
 Tüm Kategoriler
Tüm Kategoriler 


")
")
")
")
")
- Ürün Özellikleri
- Ödeme Seçenekleri
- Yorumlar (0)
-
SLAMKit Mobil Robotlar için SLAM Yazılım Lisanslama Kiti (Lisans Kartı Donanım Modülü + Lisanslı Yazılım) - DEVELOPER EDITION
SLAMKit, Slamtec tarafından kendine özgü bir teknoloji ile geliştirilen ve farklı tipte mobil robotların, harita oluşturma (mapping) ve gerçek zamanlı pozisyonlama (SLAM) yapabilmesi için oluşturulmuş bir lisanslama çözümüdür. Slamkit SLAM kiti, geniş alanları yüksek çözünürlükte haritalayabilir ve değişken ortamlarda kararlı gerçek zaman verilerini bir kayma olmadan üretebilir. SLAMKit sağlamış olduğu toolchain (UI software Robostudio & SDK toolkit serisi gibi) ile robotların otonom lokalizasyon ve navigasyon yeteneklerinin gelişimini hızlandırır ve ürün geliştirme döngüsü önemli ölçüde kısaltır.
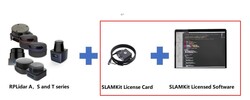
SLAMKit, yazılım lisanslama yoluyla robot kontrol kartı üzerinde gömülü olarak çalışır. SLAMKit 3 temel komponentten oluşur:
- - RPLidar (AYRI olarak satın alınmalıdır)
- - Lisanslama modülü (pakete DAHİL)
- - Slamware lisanslı yazılım (pakete DAHİL)
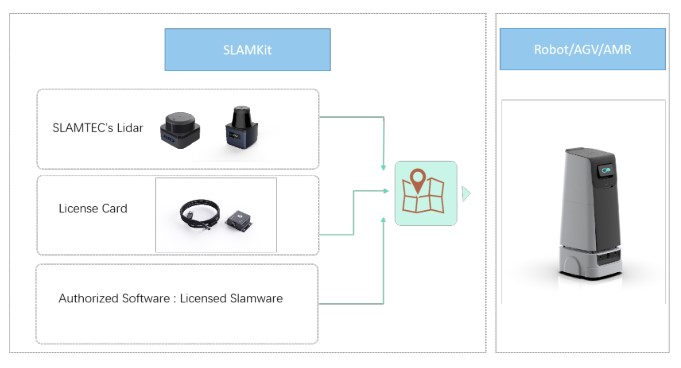
Kaynak: Slamtec (User Manuel)
Slamware olarak bilinen lisanslı yazılım, sistem şeması aşağıda gösterilen SLAMKit'in temel bileşenidir. Sistem girdileri arasında lidar frame verisi, lisans kartı tarafından algılanan veriler ve odometri verileri bulunmaktadır (Bknz aşağıdaki görsel). Yukarıdaki girdiler arasında, kullanıcıların yalnızca ROS topic aracılığıyla odometri verisini sağlamaları gerekir. Ayrıca sistem çıktıları; Robostudio, C++ SDK, Java SDK, ROS SDK gibi ikincil geliştirme ortamlarında kullanılmak üzere birbirine aktarılabilir.
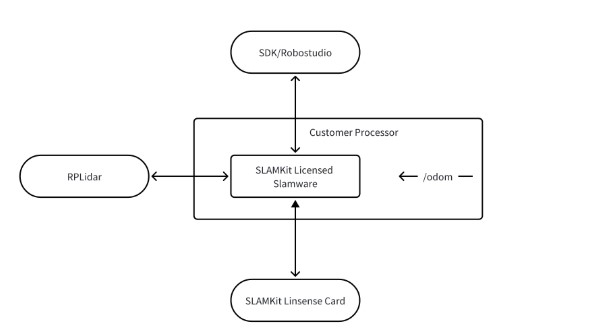
Kaynak: Slamtec (User Manuel)
Lisanslı slamware, otorizasyon anahtarına göre iki versiyona ayrılabilir: geliştirici sürümü ve pro sürümü. İşte aralarındaki farklar:
Developer Edition PRO Edition haritalama alanı 150m * 150m 500m * 500m operasyon süresi 1.5 saat (tekrarlı) limitsiz update servisi yok tekrarlı olarak SlamKit Yazılım Lisanslama Diğer Öne Çıkan Özellikler

ÖZET
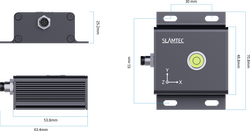
temel parametreler
- Haberleşme: Yerel USB arayüzü ve USB protokolü
- Çıkış: Çip üzerinde zaman etiketi, 3 eksenli ivmeölçer, 3 eksenli jiroskop, 3 eksenli eksen pusulası, 3D Euler açıları, Kuaterniyonlar, Yüksek hassasiyetli yaw açısı, -Modül durağan hal vb.
- Çıkış Frekansı: 200Hz
- Startup Süresi: 10000 ms(açılışta kendi kendine test dahil)
- Çalışma Sıcaklığı: -40°C~+85°C
- Depolama Sıcaklığı: -40°C~+100°C
- Desteklenen Cihazlar: Intel veya ARM IPC + Ubuntu 18.04, 20.04 ve 22.04
- Çalışma Gerilimi: 5V
- Çalışma Akımı: 12mA
- Uyku Akımı: 20uA
- Ürün Boyutları: 70.8mm * 63.4mm * 25.2mm
- Geliştirme Araçları: C++ SDK, ROS nodelisans kartı donanım modülü üzerindeki IMU bileşenleri:
* akselerometre
- Aralık: ±2g
- Hassasiyet: 16384 LSB/g
- Başlangıç tolerası (board-level): tüm eksenler ±50mg
- Sıcaklığa Karşı Sıfır-G Seviye Değişimi (0°C~+85°C arası): 0,80mg/°C
- Gürültü Spektral Yoğunluğu (Gürültü Bant Genişliği=10Hz):230µg√Hz
- Çapraz Eksen Hassasiyeti: / ±2%* jiroskop
- Ölçüm Aralığı: ±2000°/s
- Hassasiyet: 16,4 LSB/(°/s)
- Başlangıç Toleransı (25°C'de, yatay olarak yerleştirilmiş):±5°/s
- Sıcaklıkla ZRO Varyasyonu (-40°C~+85°C): ±0,05(°/s)/C
- Gürültü Spektral Yoğunluğu (Bant Genişliğine Göre=10Hz ): 0,015(°/s)/√Hz
- Cross-axis Hassasiyet: / ±2%* pusula
- Ölçüm aralığı: ±4900 µT
- Hassasiyet: 0,15 µT / LSB
- İlk Kalibrasyon Toleransı: -2000 ~ 2000 LSB* açı:
- Pitch & Roll Ölçüm Aralığı: X:±180° Y:±90°
- Yaw Aralığı: Z:±180°
slamware yazılım özellikleri:
- Max haritalama alanı: 500000m² ~ 1200000m²
- Haritlama çözünürlüğü: 1cm, 2.5cm, 5cm(Opsiyonel)
- Gerçek Zamanlı lokalizasyon sapması: ±5mm, ±1° (tipik değer)
- Lokalizasyon stabilitesi: Haritada %50 lik değişimde bile stabil
- Max algılalama menzili: 50m(tipik değer)
- Tarama frekansı: 10 ~ 20Hz
- Lokalizasyon çıkış frekansı: 20 ~ 100HzBağlantılar




-
 129.177,26 TL + KDV
129.177,26 TL + KDV -
2.143,21 TL + KDV
-
11.867,59 TL + KDV

 2D TOF 270° Lidar Lazer Tarayıcı | 0.05~40m, 60K")

 - 12m, UART / I2C")

 | 40m, 32K")
 360° DTOF Lidar | 30m, 32K, Ethernet, 12V")
 360° DTOF Hassas Lidar | 18m, 32K, UART, 5V")

 | 0.2-12m, 16K")
")
