
 Categories
Categories 


- Features
- Payment Options
- Comments (0)
-
TB 3 Waffle Pi RPi4 2GB, Raspberry Pi-Controlled Autonomous Robot
Turtlebot3 Waffle Pi RPi4 2GB is the new TB3 mobile robot with significant increases in CPU, RAM, Graphics performance compared to the old version Waffle with RPi3 (Raspberry Pi3). With Waffle Pi RPi4, you can run image processing and machine learning algorithms faster and process a large number of sensor data in parallel. The processor of the Waffle Pi RPi4 2GB is an advanced processor that supports USB 3.0 peripherals and different network connection structures, increasing the usability of the robot.
Turtlebot3 Waffle Pi RPi4 2GB is a small, open-source, modular and ROS (Robot Operating System) based mobile robot platform. It is used for education, R&D, hobby and product prototyping purposes. Turtlebot3 Waffle Pi is preferred worldwide for many studies in the fields of education and research, especially in SLAM and navigation algorithms. In addition, unlike TurtleBot3 Burger, object handling and displacement applications can be tried by attaching a manipulator to Waffle Pi.
Turtlebot3 Waffle Pi RPi4 hardware is now compatible with NVIDIA Jetson NANO and can be controlled via Jetson Nano.
Waffle Pi is a powerful robot for its size. There are minor deviations in performance values up to 20-25 kg payload values; the maximum payload is specified as 30 kg. Can be used with Gazebo simulator.
There are a number of differences between the old and discontinued version of Waffle and the new Waffle Pi versions. The TurtleBot 3 Waffle offers the Intel® Joule™ SBC microcontroller, while the Turtlebot3 Waffle Pi RPi4 2GB is built on the Raspberry Pi 4. This gives users the possibility to use Raspberry Pi-compatible modules (such as the Raspberry Pi camera that comes installed on the robot). The Waffle Pi robot can be controlled by remote control and can record video.
While the old TurtleBot 3 Waffle came with 2 Dynamixel servos with RS-485 interface, the new Waffle Pi4 servos can be controlled via TTL interface.Robotis' programmable robot includes a Raspberry Pi4 that can run ROS and Ubuntu on it. It has software that runs on Apache 2.0 and is completely Open Source. Another interesting feature is that it is possible to 3D print the robot elements or buy them ready for assembly. TB3 Waffle runs on Ubuntu Linux (13.04.2 LTS) and the latest versions of ROS (Kinetic). Besides using ROS to control the robot, you can also program additional behaviors on the robot using C/C+ functions and Arduino libraries.

1-THE MOST POPULAR PLATFORM OF THE WORLD
Turtlebot is the world's most popular open source robot for education and research.
2-COST
Turtlebot is the optimal platform for education, prototyping, research & development.
3-DIMENSIONS
Carry Turtlebot in your backpack and take it with you wherever you go.
4-ASD
Take ideas beyond imagination with a mini computer (raspberry pi, intel joule, etc.), sensors, motors and flexible construction.
5-MODULAR ACTUATOR (SMART SERVO MOTOR)
Easy to install, maintain, replace and reconfigure.
6-OPEN SOURCE SOFTWARE
Various open-source software for the user.
7-OPEN SOURCE HARDWARE
Schematic, PCB Gerber, BOM and 3D CAD data are fully open to the user.
8-POWERFUL SENSORS
Enhanced 360 LIDAR, 9 Axis IMU sensor (inertial measurement unit sensor) and precision encoder
Layered Structure of TurtleBot 3 Waffle Pi RPi4 2GB Mobile Robot
All the sensors Robotis offers also work on the Waffle Pi RPi4: motion, temperature, color, contact sensors... Unlike the previous version, TB3 Waffle Pi RPi4 features LDS-2 instead of LDS-1 (Laser Distance Sensor). The LDS-2 stands out for its superior performance (detection distance, accuracy and sampling rate) in SLAM and navigation applications and communicates via the TX UART port.
The structure of the TurtleBot3 Waffle Pi robot is fully modular. Both TurtleBot3 models (Burger and Waffle Pi) have a 2D lidar that allows you to implement SLAM (simultaneous mapping and localization) and autonomous navigation algorithms and are basically controlled via Raspberry Pi.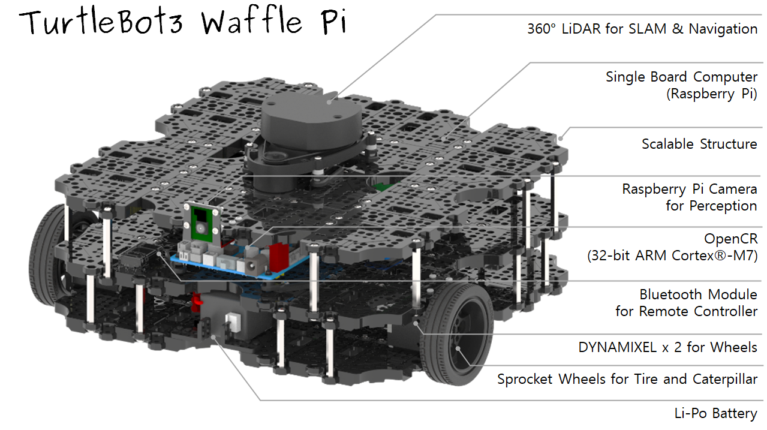
o The first layer contains the Dynamixel XM430 servos and battery.
o The second layer contains components such as the basic OpenCR controller, Raspberry Pi camera, Turtlebot3 Waffle Pi RPi4 2GB SBC board and bluetooth module.
o The top layer contains the 360-degree leader of the Waffle Pi.
Turtlebot3 Waffle Pi RPi4 2GB can take 2 to 4 hours to fully assemble.
TurtleBot3 Waffle vs Waffle Pi RPi4 2GBTech Specs Waffle (Discontinued) Waffle Pi RPi4 2GB Max linear speed 0.26 m/s 0.26 m/s Max rotational speed 1.82 rad/s (104.27 deg/s) 1.82 rad/s (104.27 deg/s) Max payload 30kg 30kg Dimensions (L x W x H) 281mm x 306mm x 141mm 281mm x 306mm x 141mm Weight (+ SBC + Battery + Sensors) 1.8kg 1.8kg Climbing threshold 10 mm or less 10 mm or less Expected working time 2 hr 2 hr Expected charging time 2 hr 30 min 2 hr 30 min SBC (Single Board Computers) Intel® Joule™ 570x Raspberry Pi 4 Model B 2GB MCU (OpenCR) 32-bit ARM Cortex®-M7 with FPU
(216 MHz, 462 DMIPS)32-bit ARM Cortex®-M7 with FPU
(216 MHz, 462 DMIPS)Remote control - RC-100B + BT-410 Set (Bluetooth 4, BLE) Actuator Dynamixel XM430-W210 (RS-485) Dynamixel XM430-W210 ( TTL ) LDS (Laser Distance Sensor) 360 Laser Distance Sensor LDS-01 360 Laser Distance Sensor LDS-02 Camera Intel® Realsense™ R200 Raspberry Pi Camera Module v2.1 IMU Accelerometer 3 Axis (3 eksenli)
Magnetometer 3 Axis (3 eksenli)
Accelerometer 3 Axis (3 eksenli)Accelerometer 3 Axis (3 eksenli)
Magnetometer 3 Axis (3 eksenli)
Accelerometer 3 Axis (3 eksenli)Expansion Pins GPIO 18 pins
Arduino 32 pinsGPIO 18 pins
Arduino 32 pinsPeripherals UART x3, CAN x1, SPI x1, I2C x1, ADC x5,
5pin OLLO x4UART x3, CAN x1, SPI x1, I2C x1, ADC x5,
5pin OLLO x4, USB3.0 x2, USB x2, MicroHdmiDynamixel ports RS485 x 3, TTL x 3 RS485 x 3, TTL x 3 Audio programmable 'beep' sequence programmable 'beep' sequence Programmable LEDs User LEDs x 4 User LEDs x 4 Status LEDs Board status LED x 1
Arduino LED x 1
Power LED x 1Board status LED x 1
Arduino LED x 1
Power LED x 1Buttons and switches Push button x 2, Reset button x 1,
Dip switch x 2Push button x 2, Reset button x 1,
Dip switch x 2Battery Lithium polymer 11.1V 1800mAh / 19.98Wh 5C Lithium polymer 11.1V 1800mAh / 19.98Wh 5C PC connections USB USB Bluetooth - Bluetooth 5.0 Firmware upgrade USB / JTAG USB / JTAG Power (SMPS) Input : 100-240V, AC 50/60Hz, 1.5A @max
Output : 12V DC, 5AInput : 100-240V, AC 50/60Hz, 1.5A @max
Output : 12V DC, 5ADimensions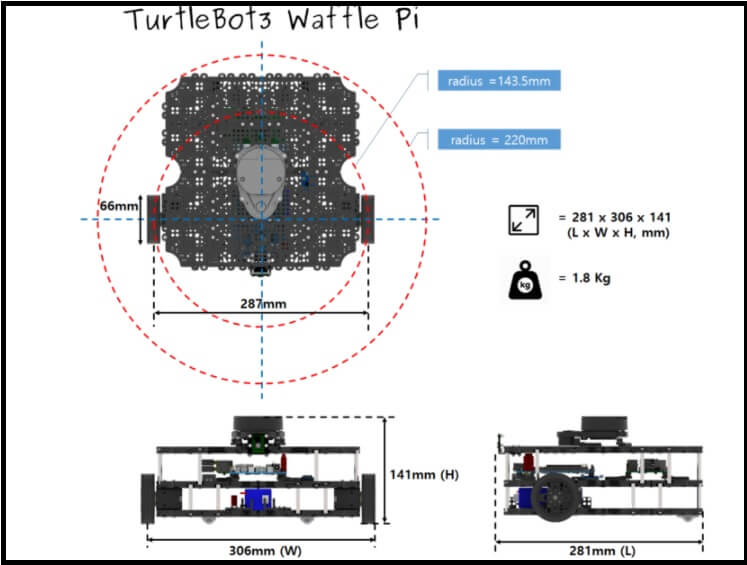
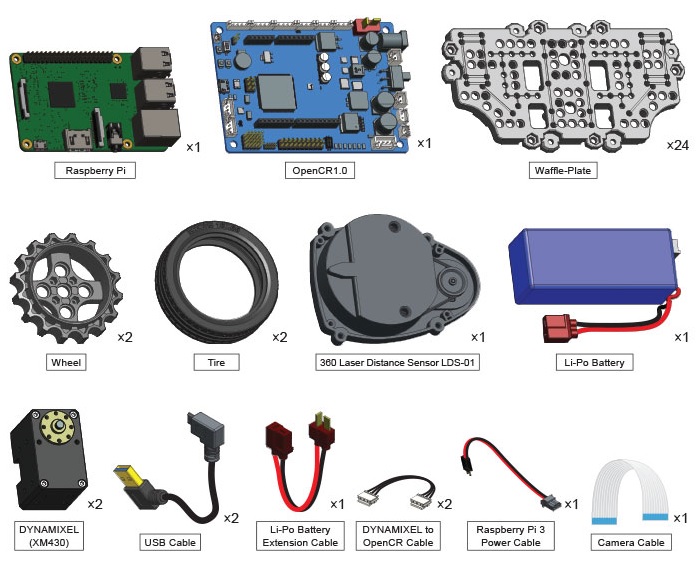
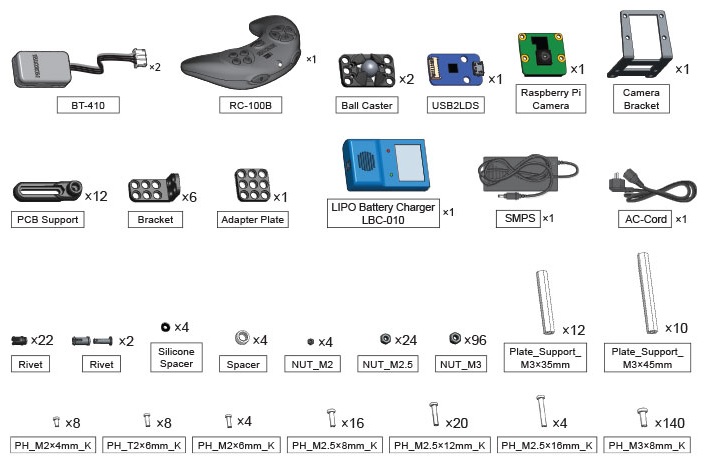
Package Content
note: LDS-01 is replaced with LDS-02!
Links
- e-Manual : http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
- TB3 Homepage
- ROS Community
- GitHub
- STL Drawing












-
 23,485.00 TL + VAT
23,485.00 TL + VAT -
3,845,842.00 TL + VAT
-
6,256.25 TL + VAT
-
5,155.15 TL + VAT
-
198,275.00 TL + VAT
-
35,612.50 TL + VAT

")
")
")


")


")

