
 Tüm Kategoriler
Tüm Kategoriler 






")
")
")
")
")
")
")
")
")
ROSPug Quadruped Bionik Robot Köpek (Jetson NANO Entegre, ROS ve Pyton Desteği)
Ön Siparişli üründür. Teslim Süresi: 4-8 Hafta
| : | info@robotsepeti.com | |
| tel | : | 0212 6976212 |
- Ürün Özellikleri
- Ödeme Seçenekleri
- Yorumlar (0)
-
ROSPug Quadruped Bionik Robot Köpek (Jetson NANO Entegre, ROS ve Pyton Destekli, Open Source)
ROSPug, Robot İşletim Sistemi (ROS) üzerine tasarlanmış bir akıllı dört ayaklı (quadruped) robot köpektir. 12 yüksek voltajlı güçlü manyetik seri veri yolu servosu ile donatılmıştır ve NVIDIA Jetson Nano denetleyici, TOF Lidar, HD kamera, IMU sensörü, OLED ekran ve daha fazlası dahil olmak üzere bir dizi yüksek performanslı bileşeni üzerinde barındırır. Kendi geliştirdiği dinamik dengeleme kinematiği algoritması sayesinde birden fazla yürüyüş tarzı arasında sorunsuzca geçiş yapabilir.
ROSPug, Gazebo simülasyonunu destekleyerek kullanıcılara dört ayaklı kinematik algoritmalarını ve yol planlamasını öğrenmek ve doğrulamak için değerli bir platform sağlar. Denetleyicisinin (Jetson NANO) yüksek hesaplama gücü sayesinde ROSPug, SLAM haritalama navigasyonu, yol planlama, dinamik engellerden kaçınma, tırmanma, engel atlama ve diğer birçok uygulama gibi görevleri yerine getirebilir. Ayrıca, kullanıcıların özel ihtiyaçlarını karşılamak için derin öğrenme, makine görmesi ve diğer geliştirme projeleri ROSPug un yer alabileceği projelerdir.ROSPug Yapay Görme Desteğine sahip robot köpekte ne çıkan tüm özelliklere göz atın:
- 12 DOF Alüminyum Alaşımlı Yapı
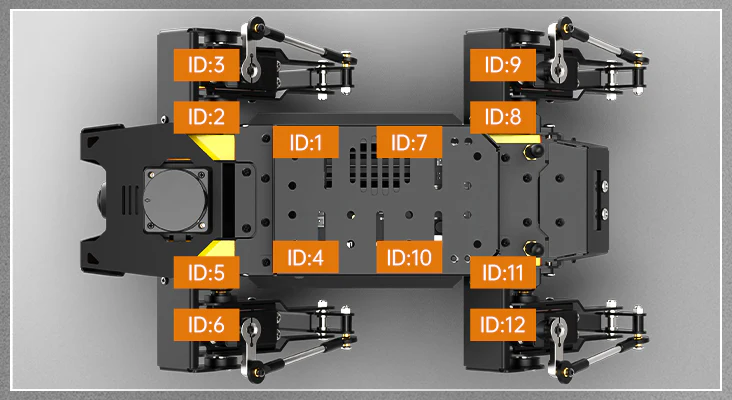
ROSPug, her bir bacağının dirsek, omuz ve kalça eklemlerine dağıtılmış, gerçek bir dört ayaklı hayvanın duruşunu yakından taklit eden 12 yüksek performanslı servo kullanır. Tüm gövdesi alüminyum alaşımdan üretilmiştir ve baldır eklemi metal yataklarla güçlendirilerek hem düşük ağırlık hem de yüksek mukavemet sağlar.
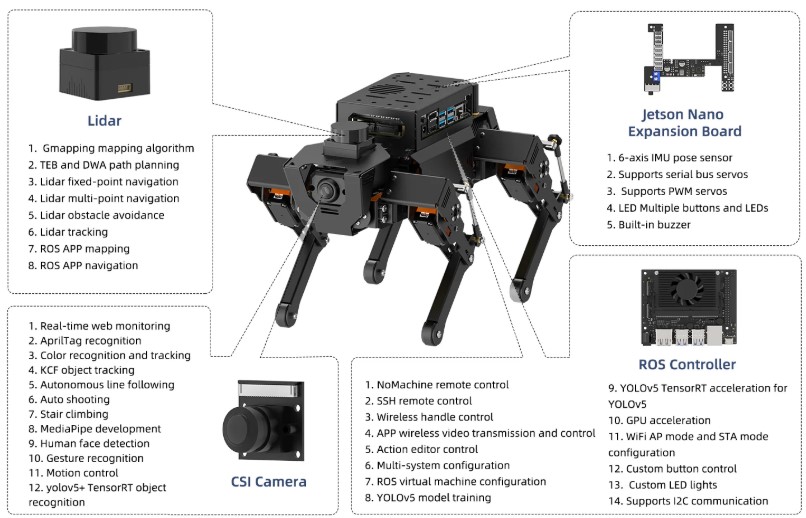
- Yüksek Performanslı Donanım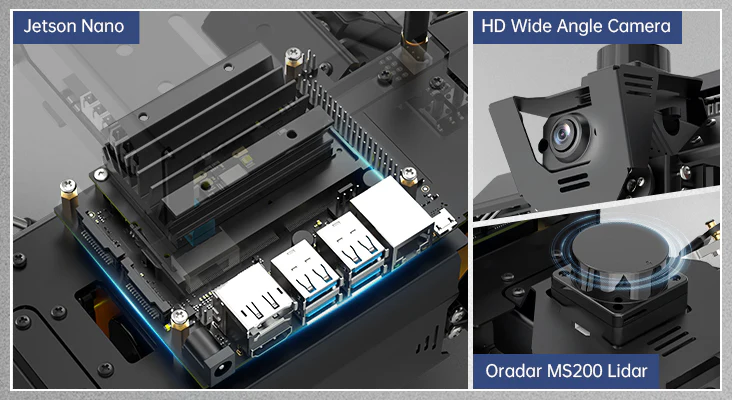
Jetson Nano tarafından desteklenen ROSPug, yüksek performanslı Lidar ve HD geniş açılı kameraya sahiptir ve çeşitli yaratıcı yapay zeka uygulamalarının doğrulanmasını sağlar.
- Bağlantı Yapısı Geliştirilmiş Eklem Verimliliği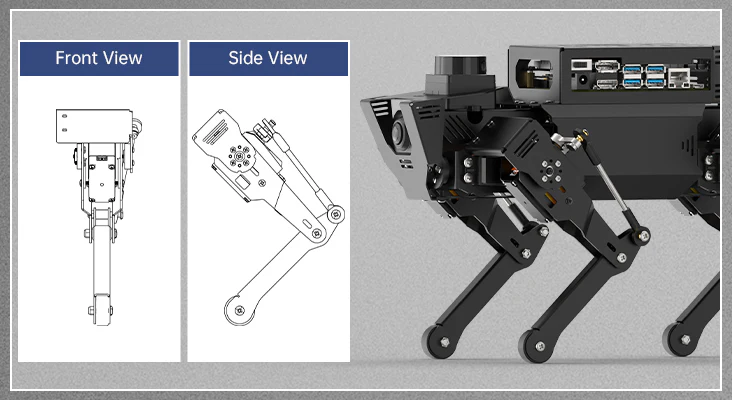
ROSPug, baldır ekleminin hızını artıran ve girişim olmadan düzgün hareket sağlayan ve böylece bacağın dönüş aralığını genişleten bir bağlantı yapısına sahiptir.
- Yüksek performanslı Akıllı Bus Kontrollü Servo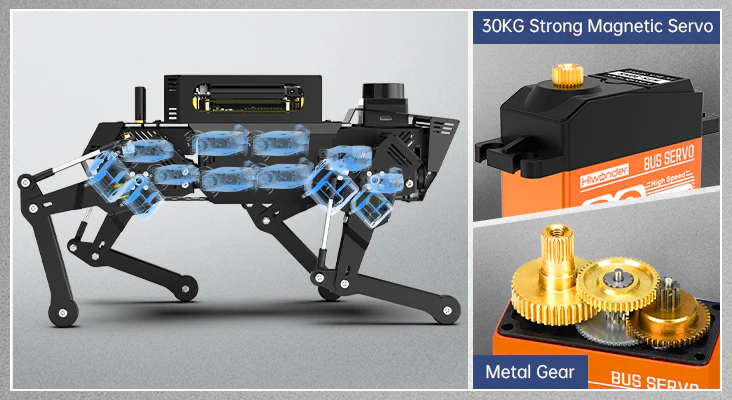
ROSPug, 30KG torka sahip yüksek performanslı akıllı seri veri yolu servolarına sahiptir ve olağanüstü doğruluk, veri geri bildirimi, kolay kablolama ve sağlam bir 12V voltaj güç kaynağı desteği sunar.
- Verimli Çalışma için Çift Kontrolörlü Tasarım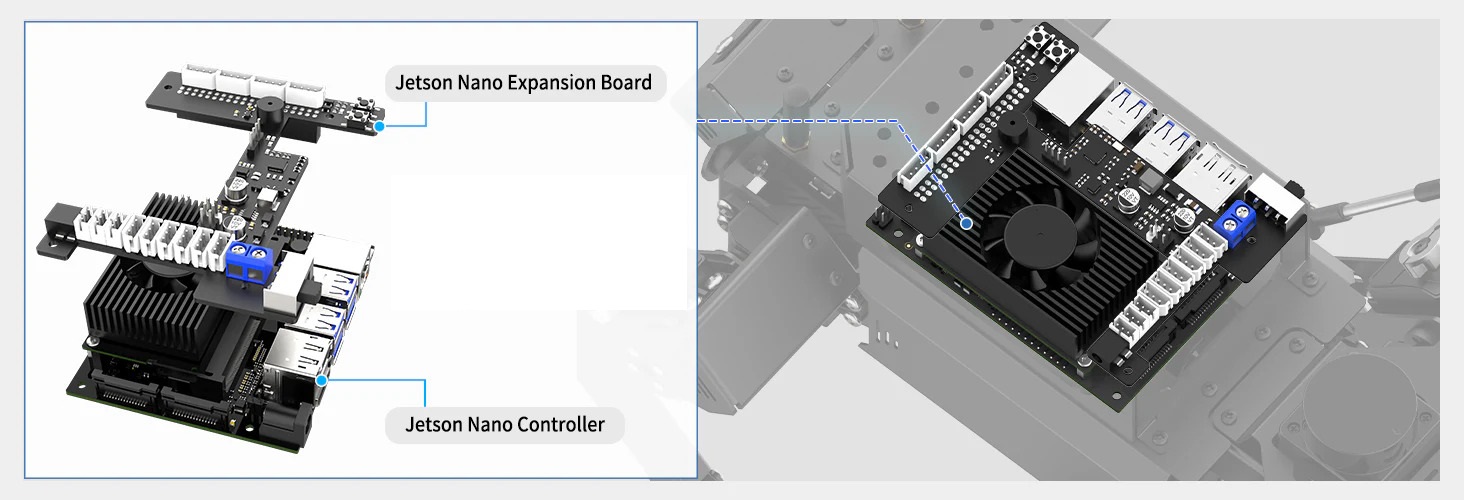
ROSPug, Jetson Nano'nun gelişmiş yapay zeka yeteneklerini MCU'nun yüksek frekanslı kontrol işlevleriyle birleştiren çift kontrolörlü bir tasarıma sahiptir. Bu entegrasyon, operasyonel doğruluğu artırarak sistemin daha karmaşık zorlukların üstesinden gelmesini ve daha geniş bir olasılık yelpazesini keşfetmesini sağlar.
- Ters Kinematik Yürüyüş Planlaması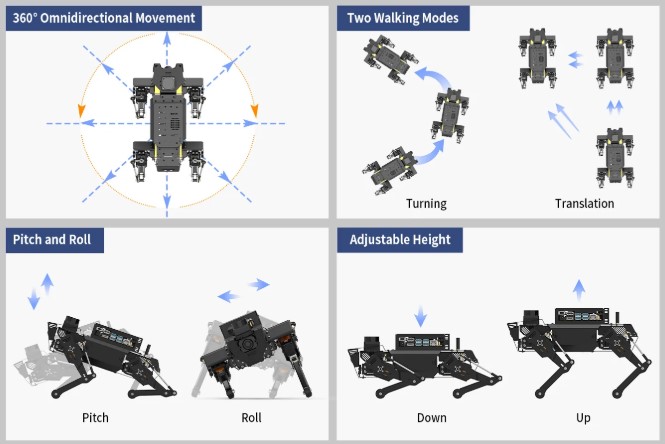
Yürüyüş, Amble ve Trot Yürüyüşlerini Destekleyin. Walk, Amble ve Trot yürüyüşleri, her bir bacağın iniş zamanı, kalkış zamanı, kalkış yüksekliği ve ön ve arka bacaklar arasında geçiş zamanlaması ince ayarlanarak elde edilebilir.
o Ters Kinematik Planlaması
ROSPug, kullanıcıların her bir bacak için uç koordinatları tanımlamasına olanak tanıyan, hareket düzenlemesi için görsel bir PC yazılımı ile birlikte gelir. Robot daha sonra her bir servonun açılarını hesaplamak için ters kinematik algoritması kullanarak ayaklarının istenen hedef konumlara ulaşmasını sağlayan bir hareket profili oluşturur.
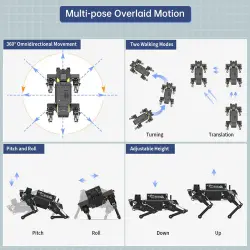
o Ayarlanabilir Yürüme Yüksekliği, Hız ve Poz
ROSPug'ın yüksekliği, eğimi, yunuslama açısı ve yuvarlanma açısı serbestçe ayarlanabilir. Kullanıcılar hem sallanma hem de dönüş hareketleri elde etmek için bu değişkenleri seçerek ayarlayabilirler.
o IMU ile Kendi Kendini Dengeleme ve Yalpa Açısı Düzeltme
ROSPug, kapalı döngü kontrolü için gerçek zamanlı poz izleme ve veri toplama yeteneğine sahip bir IMU sensörünü entegre eder. Uçağın eğimine bakılmaksızın, ROSPug dengeyi korumak için derhal sadece eklemlerini kullanabilir.
- Çeşitli Araçlar ile Kontrol Edilebilme
o PC Yazılım Kontrolü
Grafiksel PC yazılımını kullanarak, programlamaya gerek kalmadan sadece sürgüleri sürükleyerek servoları zahmetsizce kontrol edebilir ve eylemleri özelleştirebilirsiniz.
o Python Programlama Desteği
Tüm akıllı Python kodu, kolay kendi kendine çalışma için ayrıntılı açıklamalarla birlikte açık kaynak kodludur.
o Koordinat PC Yazılım Kontrolü
Kullanıcıların ROSPug'ın yeteneklerini keşfetmelerini desteklemek için ayrıntılı dört ayaklı kinematik analizi, ROS tabanlı ters kinematik işlevleri ve parametre hata ayıklama yazılımı sunuyoruz.
o Uygulama Kontrolü
Android ve iOS mobil uygulaması mevcuttur. APP aracılığıyla robotu uzaktan kontrol edebilir ve robotun gördüklerini görüntüleyebilirsiniz.- Makine Görmesi

o Çizgi Takibi
ROSPug kırmızı çizgileri tanıyabilir ve ardından yürüyüşünü (walk modeli) ayarlamak ve çizgi takibini gerçekleştirmek için çizginin konumunu hesaplayabilir.
o Daire İçinde Sürüklenme
Dairesel yığını tanımlamak için görsel tanıma özelliğini kullanan ve Lidar kullanarak kendisi ile yığın arasındaki mesafeyi ölçen robot, dairesel sürüklenme gerçekleştirmek için hareket yönünü ayarlayabilir.
o Yukarı ve Aşağı Merdivenler
Bağımsız görme muhakemesi sayesinde, öndeki merdivenlerin konumu belirlenir ve otonom olarak merdivenlerden inip çıkma gerçekleştirilir.
o Topla şut çekme
ROSPug, topun konumunu belirlemek için OpenCV kullanır ve gerçek zamanlı top takibi için bir PID algoritması kullanır. Bu yaklaşım, hedefe olan mesafeyi ve hedefin konumunu göz önünde bulundurarak doğru top atışı elde etmek için yürüyüşüne ince ayar yapmasına olanak tanır.
o Görme Tanıma Hedef Takibi
ROSPug, kafasında farklı hedefleri tanıyabilen ve bulabilen dahili bir HD geniş açılı kameraya sahiptir, böylece Etiket tanıma, yüz tanıma, renk izleme ve KCF hedef izleme gibi yaratıcı Al oyununu gerçekleştirir.
o MediaPipe Geliştirme Aksiyon Yakalama
MediaPipe algoritması üzerine geliştirilen ROSPug, diğerlerinin yanı sıra yüz algılama, duygu tanıma, jest tanıma ve insan vücudu tanıma gibi etkileşimleri kolaylaştırarak insan vücudu özelliklerini tanımlayabilir.- Lidar İşlevleri - ROSPug bir Oradar MS200 Lidar ile donatılmıştır
o Lidar Haritalama ve Navigasyon
ROSPug, lokalizasyon, haritalama ve navigasyon, yol planlama, dinamik engellerden kaçınma, Lidar izleme ve Lidar koruma vb. dahil olmak üzere lidar ile gelişmiş SLAM işlevlerini gerçekleştirebilir.
o Çeşitli 2D Lidar Haritalama Yöntemleri
TOF Lidar, haritalama amacıyla Gmapping, Hector, Karto ve diğerleri gibi haritalama algoritmalarını kullanır. Ayrıca, sabit noktalı navigasyon, çok noktalı navigasyon ve TEB yol planlamasını destekler.
o Çok Noktalı Navigasyon
ROSPug, gerçek zamanlı çevresel algılama sağlayan yüksek hassasiyetli bir Lidar ile donatılmıştır. Hem sabit noktalı navigasyonu hem de çok noktalı navigasyonu destekleyerek karmaşık navigasyon senaryoları için uygun hale getirir.
o Dinamik Engellerden Kaçınma
ROSPug, TOF Lidar kullanarak navigasyon sırasında engelleri tespit edebilir ve bunlardan etkili bir şekilde kaçınmak için yolunu akıllıca planlayabilir.
o Lidar İzleme ve Koruma
ROSPug, ilerideki hareketli bir hedefi taramak ve daha sonra izlemek için Lidar ile birlikte çalışabilir. ROSPug, güvenli alanı taramak için TOF Lidar kullanır. Davetsiz misafiri tespit ettiğinde, otomatik olarak davetsiz misafire doğru dönecek ve bir alarmı etkinleştirecektir.- Gazebo Simülasyonu
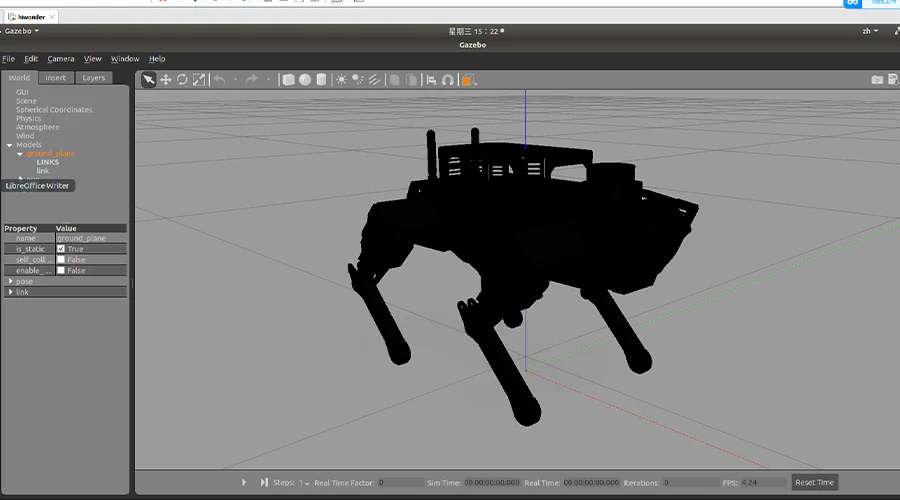
ROSPug, ROS çerçevesini kullanır ve Gazebo simülasyon desteği sunar. Gazebo, ROSPug'ı kontrol etmek ve algoritmaları simüle edilmiş bir ortamda doğrulamak için yeni bir yaklaşım sunarak fiziksel deneylere olan ihtiyacı azaltır ve verimliliği artırır.ROSPug Robot Köpek Yetenek ve Fonksiyonları
ÖZET
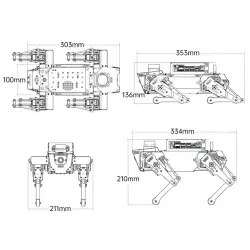
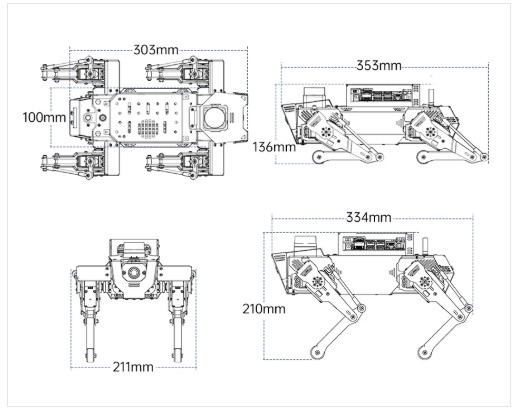
- Boyut 334*211*210 mm
- Ana kontrolör Jetson Nano
- Eklemlerin torku 30KG.cm 12V
- Malzeme Alüminyum alaşımlı yapı + kauçuk (ayak pedi)
- DOF 12DOF
- Ağırlık Yaklaşık 1.65KG
- Kamera pikseli 8 megapiksel
- Güç 11.1V 3500mAh 5C LiPo pil
- App WonderROS (Android/iOS)
- Yerleşik ana bilgisayar Jetson Nano
- GPU NVIDIA Maxwell mimarisi, 128 NVIDIA CUDA çekirdeği ile donatılmıştır
- CPU Dört çekirdekli ARM Cortex-A57 MPCore işlemci
- Bellek 4GB 64-bit LPDDR4
- Depolama 64GB SD kart
ROSPug Boyutlar
Paket İçeriği














-
 3.892.541,51 TL + KDV
3.892.541,51 TL + KDV -
3.789.199,70 TL + KDV
-
1.079.399,75 TL + KDV
-
3.312.237,50 TL + KDV
-
598.930,48 TL + KDV
-
200.682,63 TL + KDV

")
")
")
")
")


")

")
")