
 Tüm Kategoriler
Tüm Kategoriler 








Ön Siparişli üründür. Teslim Süresi: 4-8 Hafta
| : | info@robotsepeti.com | |
| tel | : | 0212 6976212 |
- Ürün Özellikleri
- Ödeme Seçenekleri
- Yorumlar (0)
-
Hiwonder JetArm ROS 6 Eksen Robot Kol Standart Kit (NANO 4GB + Derinlik Kamerası )
JetArm 6 Eksen Robot Kol, Hiwonder tarafından ROS eğitim senaryoları için geliştirilmiş masaüstü düzeyinde bir AI görüşsağlayan robotik koldur. 3D derinlik kamerası ile donatılmıştır, 3D görüş teknolojisini robotik kol kontrolü ile birleştirir ve yüksek torklu akıllı veri yolu servoları, NVIDIA Jetson Nano ana denetleyici, 7 inç dokunmatik ekran (ultimate versiyon), uzak alan mikrofon dizisi ve hoparlörler (ultimate version) gibi yüksek performanslı donanımlarla donatılmıştır. Bu donanımlar ile robotun üç boyutlu hareket kontrolü yanında, aynı zamanda üç boyutlu uzayda hedef nesneleri tanımlanması, izlenmesi ve yakalanması da sağlanır.
JetArm 6 Eksen Robot Kol özelliklerine yakından bakın:
Mekanik özellikler
o Derinlik algısı, 3D Esnek Yakalama
JetArm robot kolunun ucu, hedef tanıma, izleme ve yakalama gerçekleştirebilen yüksek performanslı bir 3D derinlik kamerası ile donatılmıştır. RGB + D füzyon algılama sayesinde JetArm, 3D sahnede esnek yakalama da gerçekleştirebilir.
o Tamamen metal Yapı, Yatak Tabanı
Robot kolunun gövdesi tamamen metal bir yapıya sahiptir ve yüzey anodize edilmiştir, bu da onu zarif ve güzel kılar. Taban, yüksek talep gören kapma projelerini karşılamak için endüstriyel sınıf rulmanlar kullanır.
o Toplu ve Sade Kablolama
JetArm sarılı bir yapı tasarımını benimser ve servo kabloları gövdenin içine gizlenebilir, bu da gövdenin dışını temiz ve düzenli hale getirir.
o Dairesel Mikrofon Dizisi
Dairesel mikrofon dizisi, bir mikrofon dizisine ve bir modül anakartına bölünmüştür. Daha güçlü genel performansa ve 10 metreye kadar ses alma aralığına sahiptir.
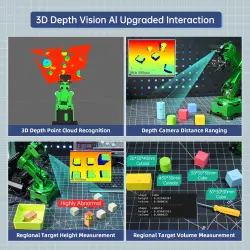
3D Derinlik Görüşü Al Yükseltilmiş Etkileşim
Gemini plus 3D derinlik kamerası ile donatılmış olan JetArm, çevresel değişiklikleri etkili bir şekilde algılayarak insanlarla akıllı Al etkileşimine olanak tanır.
1) 3D Derinlik Nokta Bulutu Tanıma
Derinlik kamerasının ilgili APl'si aracılığıyla JetArm, algılama ortamının derinlik haritasını, renk haritasını ve nokta bulutu haritasını elde edebilir ve ardından şekil tanıma, renk sıralama, yükseklik ölçümü, malzeme algılama vb. elde etmek için hedef öğenin RGB verilerini, konum koordinatlarını ve derinlik bilgilerini elde edebilir.
2) Derinlik Kamerası Mesafe Aralığı
Derinlik kamerası, bir nesnenin derinlik nokta bulutu verilerini yakalayarak nesne ile kamera arasındaki mesafeyi belirleyebilir. Bu, doğru nesne konumlandırma, sıralama ve izleme sağlar.
3) Bölgesel Hedef Yüksekliği Ölçümü
Nesnenin derinlik nokta bulutu verilerini elde ederek, nesnenin yüksekliği tanımlanabilir ve böylece yüksek anormal nesneleri kaldırma oyunu gerçekleştirilebilir.
4) Bölgesel Hedef Hacim Ölçümü
Derinlik kamerası, derinlik nokta bulutu verilerini yakalayarak bir nesnenin şeklini ve yüksekliğini tanıdıktan sonra hacmini ölçebilir.Al Vision Tanıma Hedef Takibi
JetArm'ın 3D derinlik kamerası bir RGB lens ile donatılmıştır. Robot kolu, görüntü işleme kütüphanesi olarak OpencV kullanır, Al akıllı görüntü tanımayı destekler ve renk tanıma ve etiket tanıma gibi çeşitli akıllı görme oyunlarını gerçekleştirebilir.
1) Renk Sıralama
JetArm, farklı renklerdeki renk bloklarını tanıyabilir ve sıralayabilir Standart renklere ek olarak, JetArm çeşitli özel renkleri de tanıyabilir.
2) Etiket Tanıma, Akıllı İstifleme
JetArm farklı AprilTag'leri tanıyabilir ve akıllı istifleme elde etmek için etiket bloğunun konumunu belirleyebilir.
3) Hedef Takibi
JetArm hedefleri bulabilir ve izleyebilir, ayrıca JetArm'ın daha eğitimli hedef öğeleri izlemesini sağlamak için makine öğrenimini de kullanabiliriz.3D Uzamsal Rastgele Kavrama için RGB+D Entegrasyonu
JetArm'ın 3D derinlik kamerası, RGB ve derinlik verilerini birleştirerek hem nesnenin renk hem de derinlik nokta bulutu bilgilerini yakalar ve uzamsal temsili geliştirir. JetArm, ters kinematik algoritmasını kullanarak 3D uzamsal rastgele nesne kavrama, sıralama ve taşıma gibi gelişmiş Al görevlerini gerçekleştirebilir ve daha karmaşık ve dinamik projelere olanak sağlar.
1) RGB+D 3D Uzamsal Rastgele Kavrama
2) Ses Kontrollü 3B Uzamsal Kavrama ve SıralamaGeliştirilmiş Ters Kinematik Algoritması
JetArm, 3D sahnede herhangi bir koordinata hareket edebilen üst düzey bir ters kinematik algoritmasına sahiptir ve robot kolunun yol planlaması Python programlama ile de gerçekleştirilebilir.
1) Hedef Tespiti, Eklem Uyarlamalı Ayarlama
JetArm, tanıma alanı içindeki hedef öğeleri algılayabilir ve hedef öğenin konum koordinatlarını ve yerleştirme açısını hesaplayabilir. Robot kolunun ters kinematik algoritması ile birleştirildiğinde, her bir eklem açısı serbest kapma elde etmek için uyarlanabilir şekilde ayarlanır.
2) 3D Sahne Hareket Kontrolü
JetArm, 3D sahnede doğrusal hareket ve yol planlaması elde etmek için ters kinematik algoritmalarını kullanabilir.
3) DH Modeli ve Ters Kinematik için Kaynak Kodu Sağlar
JetArm robot kolunun ters kinematik analizini, koordinat DH modelini ve ters kinematik fonksiyon kaynak kodunu sağlayın ve robot kolunun uç koordinatlarını girerek proje geliştirme süresini büyük ölçüde kısaltın.Derin Öğrenme Modeli Eğitimi
JetArm, eğitimli bir model oluşturmak için hedef üzerinde derin öğrenme gerçekleştirebilen GoogLeNet, Yolo ve mtcnn gibi sinir ağlarını kullanır.
1) MediaPipe Geliştirme, Yükseltilmiş Al Etkileşimi
JetArm, insan vücudu tanıma, parmak ucu tanıma, yüz algılama ve 3D algılama gibi çeşitli işlevleri yerine getirmek için MediaPipe geliştirme çerçevesini kullanır.
2) Parmak Ucu Yörünge Kontrolü
Parmak uçları arasındaki mesafenin algılanmasına bağlı olarak, JetAmm ilgili eylemleri gerçekleştirebilir.
3) Atık Ayıklama
JetArm'ın kiti çöp modeli blokları ile donatılmıştır. İlgili modeli yükleyerek, JetArm farklı çöpleri hızlı bir şekilde tanıyabilir ve ilgili sınıflandırma alanına yerleştirebilir.
4) Öğe Sıralama
Günlük öğelerin modellerini eğiterek ve derinlik kamerası desteğiyle karşılık gelen modeller oluşturarak JetArm, öğelerin derinlik bilgilerini elde ederek karşılık gelen öğeleri hızlı bir şekilde tanıyabilir ve yakalayabilir.Gazebo Simülasyonu
JetArm robotik kolu ROS çerçevesi kullanılarak geliştirilmiştir ve GAZEBO simülasyonunu desteklemektedir. Robotik kol sanal bir ortamda kontrol edilir ve algoritma doğrulanır, bu da deney ortamı için gereksinimleri azaltır ve deneysel verimliliği artırır.Çeşitli Kontrol Yöntemleri
1) WonderAi Uygulaması
2) PC Yazılımı
3) Kablosuz TutamakÖZET
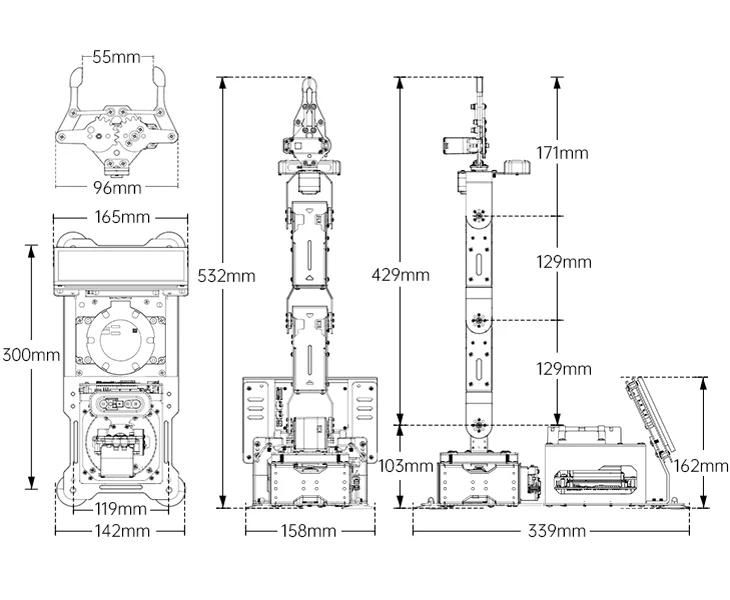
Boyut: 339*165*532mm
Ağırlık: Yaklaşık 2,4 kg (nihai kit)
Malzeme: Tam metal alüminyum alaşımlı braket
Akü: 12V 5A DC adaptör
İşletim sistemi: Ubuntu 18.04 LTS +ROS Melodic
Yazılım: IOS/Android APP
İletişim: USB/Wi-Fi/Ethernet
Programlama dili Python/ C/ C++/ JavaScript
Servo HTS-21H/HTD-35H/HX-12H bus servo
Paket boyutu (nihai kit): 39*30*18cm
Paket ağırlığı (nihai kit): Yaklaşık 4kgPaket İçeriği ve Boyutlar
paket içeriği:

boyutlar:


-
 450.450,00 TL + KDV
450.450,00 TL + KDV -
365.750,00 TL + KDV
-
182.292,50 TL + KDV
-
72.795,84 TL + KDV


 Robot Kol, 3.5Kg, 700mm, 7 DoF, ver B")
 Robot Kol, 5Kg, 700mm, 6 DoF, ver D")
 Robot Kol, 5Kg, 700mm, 6 DoF, ver C")
 Robot Kol, 5Kg, 700mm, 6 DoF, ver B")
 Robot 3Kg, 700mm, 5 DoF, ver C")
 Robot 3Kg, 700mm, 5 DoF, ver B")

, 600g, 440mm, 6DoF")
 Robot 3Kg, 700mm, 5 DoF, ver A")
")