
 Tüm Kategoriler
Tüm Kategoriler 

")
")
")
73.928,62 TL + KDV
88.714,34 TL (KDV Dahil)
Yorum Ekle
- Ürün Özellikleri
- Ödeme Seçenekleri
- Yorumlar (0)
-
Robotis OpenMANIPULATOR-X (RM-X52-TNM)
Robotis OpenMANIPULATOR-X, donanım ve yazılım olarak tamamıyla açık erişime sahip (açık kaynak kodlu - open source) ucuz ve kolay kullanımlı bir robot kol/manipülatör platformudur. OpenSoftwareOpenHardware and OpenCR(Embedded board) desteğine sahiptir. Temel amacı eğitim ve araştırma-geliştirme (ARGE - R&D) çalışmalarıdır ve bu bağlamda kullanım alanları hareket planlama, kavrama, kinematik ve mobil manipülasyon şeklinde genişletilebilir. ROS uyumludur ve Arduino ile kontrol edilebilir. Robotis OpenMANIPULATOR-X'in eklemleri yüksek yük taşıma kapasitesine (Payload -500g) sahip DYNAMIXEL XM-430 serisi aktuatörlerle oluşturulmuştur ve hareket hassasiyeti noktasında tekrarlanabilirlik (repeatibility) değerleri birçok uygulma için tatmin edicidir. XM-430 serisi aktuatörler zincir bağlantı şekline izin verir ve bu şekilde manipülatöre ilave eklem bağlantılarının oldukça kolay bir şekilde yapabilirsiniz. Ayrıca modüler ve kolay sök-tak bir yapıya sahiptir ve All-in-One bir mimari özelliklerini yansıtır.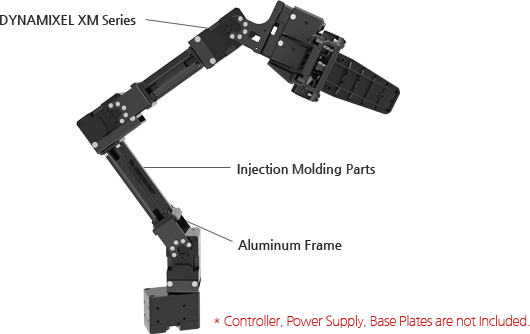
Robotis OpenMANIPULATOR-X yapısına kolayca takılabilecek uç elemanları (end-effectors) mecuttur ve ihtiyaca göre bu uçların üretimini yapabilir (3D yazıcı ile ve Onshape ve Thingiverse üzerinden basım dosyası desteği mevcut) ve ardından robot kola montajlamasını yapabilirsiniz; bu şekilde sisteminiz gereken işleve kavuşmuş olacaktır. Uç elemanlarına örnekler: Vakumlu tutucu, kesici, kalem tutucu gibi... (Aşağıdaki video)
Robotis OpenMANIPULATOR-X, PC'den veya TurtleBot3 Waffle Pi gibi bir bir mobil platformdan kontrol edilebilir. TurtleBot3 Waffle Pi ile sisteminizi hızlıca kullanmaya başlamak için gerekli kaynak kodlarına ve geliştirme ortamına kolayca erişebilirsiniz (Bağlantılara bakınız!). Üstelik OpenMANIPULATOR-X üstüne bağlandığı (mobil) platformdan fazla güç çekmez (hafif bir yapıya sahiptir)! Robotis OpenMANIPULATOR-X, TurtleBot3 adaptörü ve kontrol kartı ile uyumludur ve TurtleBot3 'ün üzerine takılarak bir mobil manipülatör oluşturulabilir (aşağıdaki video)!
Robotis OpenMANIPULATOR-X'de bir program çalıştırmak (programlamak) istediğinizde ve bunu bir PC ile yapmak istdiğinizde PC ile OpenMANIPULATOR-X arasında tercih edebileceğiniz iki yapı mevcuttur. Bunlar; ara kademede denetleyici yapı olarak bir OpenCR (embedded system) kullanmak veya ROS komutları ile OpenMANIPULATOR-X'i kullanabileceğiniz ve kodları Dynamixel aktuatörlerin kontrol sinyallerine dönüştüren U2D2 dönüştürücü ve U2D2 Güç Kartı ikilisini kullanmaktır. Her iki durum içinde 12V, 5A sağlayabilen bir SMPS adaptör gerekmektedir ve adaptör pakete DAHİL DEĞİLDİR! Ayrıca Robotis OpenMANIPULATOR-X'i bir yere sabitlemek isterseniz bir montaj platformu (base plate) gerekmektedir.
Robotis OpenMANIPULATOR-X, Robotis tarafından OpenMANIPULATOR-X benzerleri (friends) denilen yapılara dönüştürlebilir. Bu yapılar SCARA, Link, Planar, Delta, Stewart, Linear bağlantı yapılarıdır. OpenMANIPULATOR-X'i farklı DOF ve yapılarda yeniden kurduktan sonra yazılım üzerinden uygun kinematik ve trajektöri vererek birçok modern uygulama demosunu kendiniz oluşturabilirsiniz!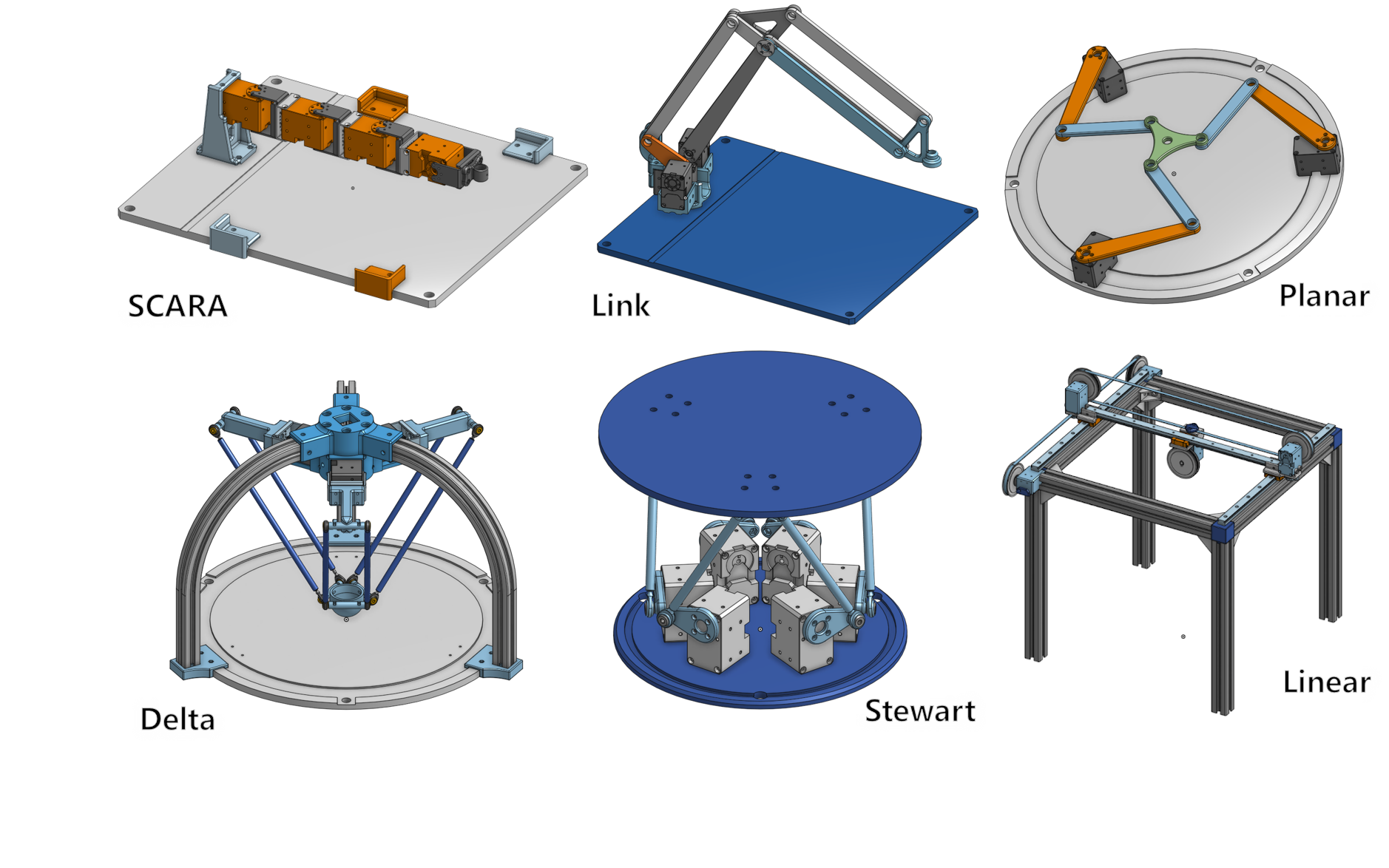
Ürünün Temel Olarak Kullanmı
OpenMANIPULATOR-X'i edindikten sonra kullanmanız için edinmeniz gereken farklı ürünler de vardır. Bunlar SMPS güç kaynağı, ürünü sabitlemek için montajlama plakası (base plate)'tir. Ardından eğer bir gömülü sistem ile geliştirme yapılacaksa OpenCR (ve bir PC) kartı, ROS komutları ile geliştirme yapılacaksa U2D2 + U2D2 Güç kartı veya yine OpenCR kartı (ve yine bir PC) gerekmektedir.
Gömülü sistem ile geliştirme yaparken algoritmanızı Arduino IDE üzerinde yazabilirsiniz, bu durumda esas işlemler gömülü sistem içinde olurken komutlar bir GUI veya joystick vasıtasıyla bilgisayardan gelir. Kontrol süreci OpenCR içinde yürür. Bu durumda OpenCR kurulumu yapılmalıdır. Ardında şu adımlar takip edilebilir:
a) Denetleyiciyi OpenCR üzerine yükleyin(uploading).
b) Sonrasında, yüklenmiş denetleyiciye komut göndermek için farklı metotlar vardır. Bu noktada USB üzerinden komut gönderen ve manipülatörün durumunu okuyan kaynak kodu (GUI üzerinde Processing source code) kullanılabilir. Diğer bir seçenek ise teleoperasyon yani RC-100 kumanda ile manipülatörü kontrol etmektir.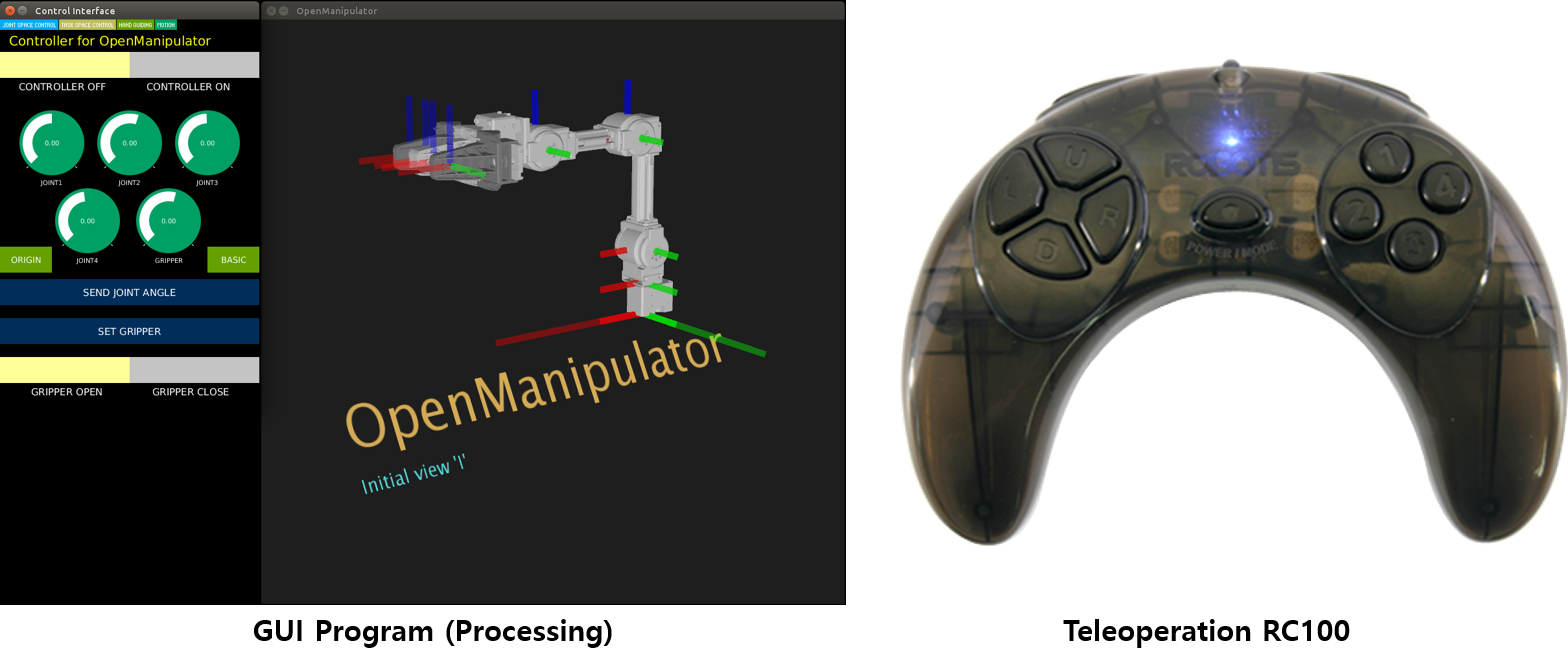
ROS ile geliştirme yapılacaksa ayrıca PC'nize Linux ve ROS OpenMANIPULATOR-X paketleri kurulmalıdır
Ardında şu adımlar takip edilebilir:
a) Öncelikle kontrol paketini çalıştırmalısınız! Ardından Robotis tarafından sağlanan paketleri kullanarak OpenMANIPULATOR-X'i istediğiniz konuma hareket ettirerek komutları denetleyici paketine gönderebilirsiniz.
b)OpenMANIPULATOR-X, MoveIt! ile de kontrol edilebilir. Kontrol paketi MoveIt! ile çalıştırılır. Bunu yaparken denetleyici paketinin (controller package) başlatma dosyasında (launch file) yer alan değişkenler ayarlanır.
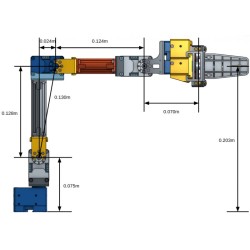
Ürün ÖzetiParçalar Birimler OpenMANIPULATOR-X Aktuatör Dynamixel XM430-W350-T Giriş Gerilimi V 12 DOF (degree of freedom) - 5 (4 DOF + 1 DOF tutucu el) Taşıma
kapasitesi (Payload)g 500 Tekrarlanabilirlik (Repeatability) mm < 0.2 Hız (Eklem) RPM 46 Ağırlık kg (lb) 0.70 (1.54) Uzanım mm (in) 380 (14.9) Tutucu/kavrayıcı El Adımı mm (in) 20~75 (0.79~2.95) Haberleşme - TTL Level Multidrop BUS Yazılım - ROS, Dynamixel SDK, Arduino,
ProcessingAna denetleyici - PC, OpenCR
Paket İçeriğiXM430-W350-T 5 Özel Plastik Gövde
Seti (Frame set)1 FR12-H101K 2 FR12-H104K 1 FR12-S101K 1 FR12-S102K 2 HN12-I101 Set 3 Robot Kablo Set X3P
(uzunluk olarak)5 Somun&Cıvata Set 1 Kauçuk pad (Tutma ucu
olarak)2 tip x 2 Phillips tornavida 1 Alyan anahtar (Tipe göre) 3
NOT: Robotis OpenMANIPULATOR-X montajı yapılmamış parçalar halinde gönderilir, montajlama kılavuzuna göre bağlantılarının yapılması kullanıcı tarafından gerçekleştirilir!
NOT: Montaj platformu (base plate), SMPS güç kaynağı, U2D2+U2D2 güç kartı ve OpenCR kartı pakete dahil değildir!
Bağlantılar
○ e-Manual : http://emanual.robotis.com/docs/en/platform/openmanipulator/
○ Drawing (Thingiverse)
○ Kaynak kodlar
○ ROS WIKI
○ Montajlama Kılavuzu
Benzer Ürünler
-
") 30.649,78 TL + KDV
30.649,78 TL + KDV -
43.903,60 TL + KDV
-
14.283,68 TL + KDV
-
147.148,17 TL + KDV
-
60.968,09 TL + KDV
-
621.754,28 TL + KDV

")
")
")


