
 Tüm Kategoriler
Tüm Kategoriler 











Hiwonder JetAcker ROS, SLAM Mobil Eğitim Robotu - Jetson NANO Destekli Advanced Kit
Ön Siparişli üründür. Teslim Süresi: 4-8 Hafta
| : | info@robotsepeti.com | |
| tel | : | 0212 6976212 |
- Ürün Özellikleri
- Ödeme Seçenekleri
- Yorumlar (0)
-
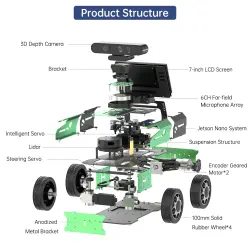
Hiwonder JetAcker ROS Otonom Sürüş, SLAM Haritalama ve Navigasyon için Mobil Eğitim Robotu - (Advanced Kit: Jetson NANO 4GB + Slamtec A1 Lidar + 3D Derinlik Kamerası + Mikrofon Dizisi & Hoparlör + 7" Ekran)
JetAcker, NVIDIA Jetson Nano tarafından desteklenmektedir ve Robot İşletim Sistemini (ROS) modellemelerine uygun bir mobil eğitim robotudur. Ana akım derin öğrenme çerçevelerinden yararlanır; MediaPipe geliştirmeyi içerir, YOLO model eğitimine imkan sağlar ve TensorRT hızlandırmasını kullanır. Bu kombinasyon, otonom sürüş, somatosensoriyel etkileşim ve KCF hedef takibi dahil olmak üzere çok çeşitli 3D yapay görme uygulamaları çalışabilmenizi sağlar. Ayrıca, JetAcker ile çeşitli robotik SLAM algoritmalarını uygulamalı olarak çalışabilirsiniz.
JetAcker ile öne çıkan özellikleri aşağıdan inceleyin:
o Ackerman Direksiyon Yapısı ve Pendulum Süspansiyon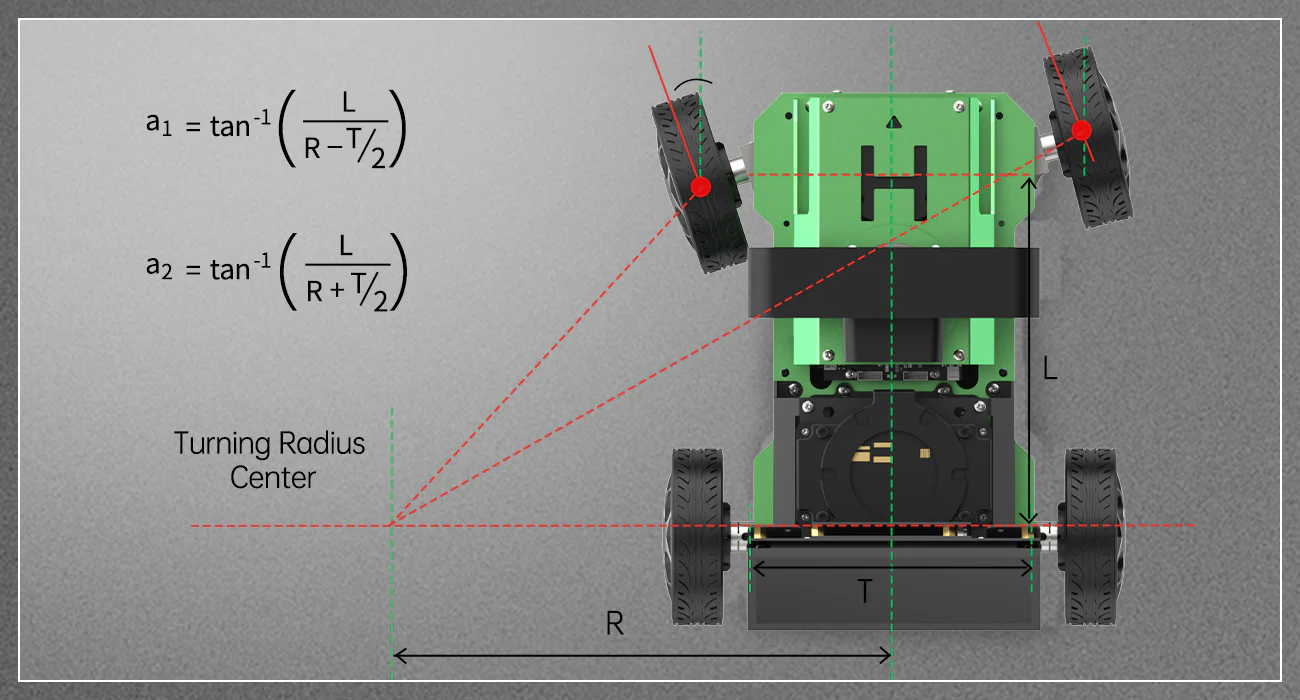
Şasinin arka tekerlekleri her zaman paralel durumdadır. Dönerken, iç tekerlek dönüş açısı dış tekerlek dönüş açısından daha büyüktür. İç ve dış tekerleklerin dönüş açısındaki farkla yönlendirme, Ackermann yönlendirmesi olarak adlandırılır.o Lidar ile donatılmıştır ve SLAM Haritalama Navigasyonunu Destekler
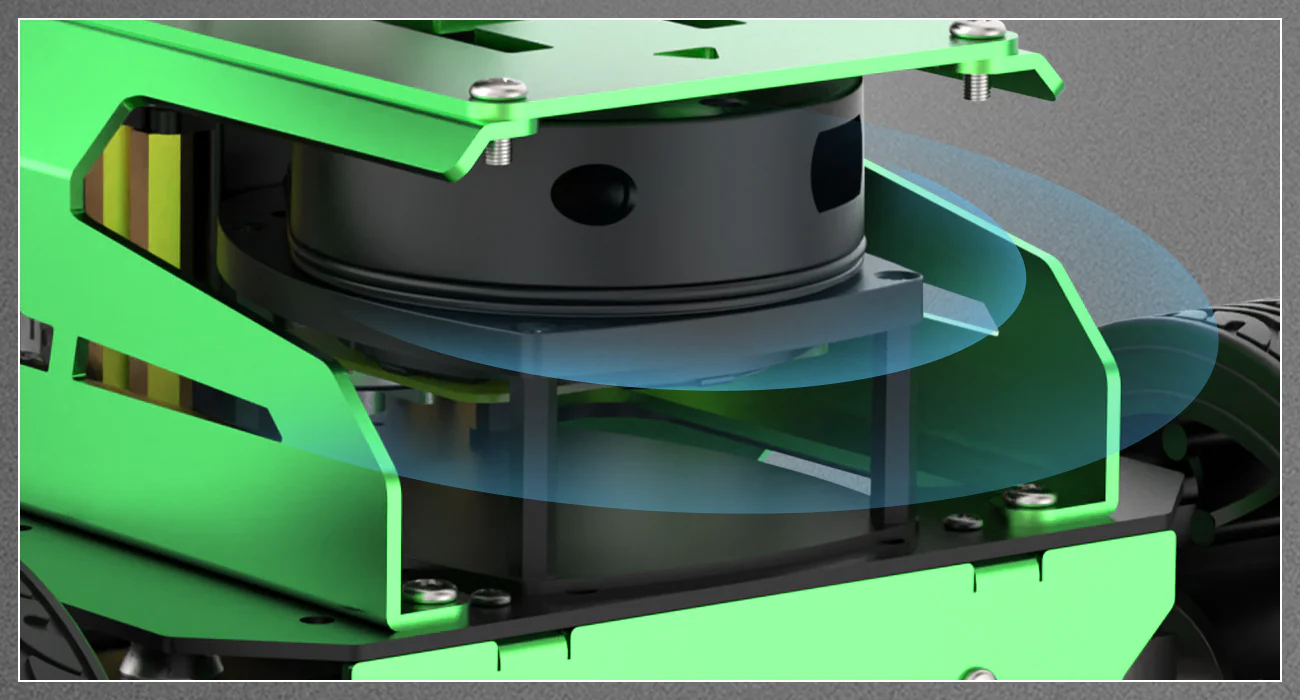
JetAcker, SLAM haritalama ve navigasyonu gerçekleştirebilen lidar ile donatılmıştır ve yol planlamasını, sabit nokta navigasyonunu ve dinamik engellerden kaçınmayı destekler.
o CNC Direksiyon Sistemi, Yüksek yoğunluklu Katı Tekerlek, Sarkaç Süspansiyon Yapısı, 240° Yüksek Performans Pan-tilt
Güçlü yataklı akıllı servo ile birleştirilmiş tam metal CNC yüksek hassasiyetli bileşenler olağanüstü dönme kuvveti sağlar. Taşıma kapasitesi, deformasyon direnci, azaltılmış sürtünme katsayısı ve en aza indirilmiş mekanik aşınma, daha uzun bir kullanım ömrü sağlar. Yüksek hassasiyetli sarkaç süspansiyon yapısı, kuvveti dengeleyerek motor üzerinde herhangi bir etkiyi önlerken düz olmayan yüzeylere iyi uyum sağlar. Pan tilt ise aşırı sıcaklık koruması sağlayan bir seri bus servo tarafından kontrol edilir. 240°'ye kadar dönme aralığı JetAcker'ın keşif aralıklarını genişletir.
o Çift Kontrolörlü Tasarım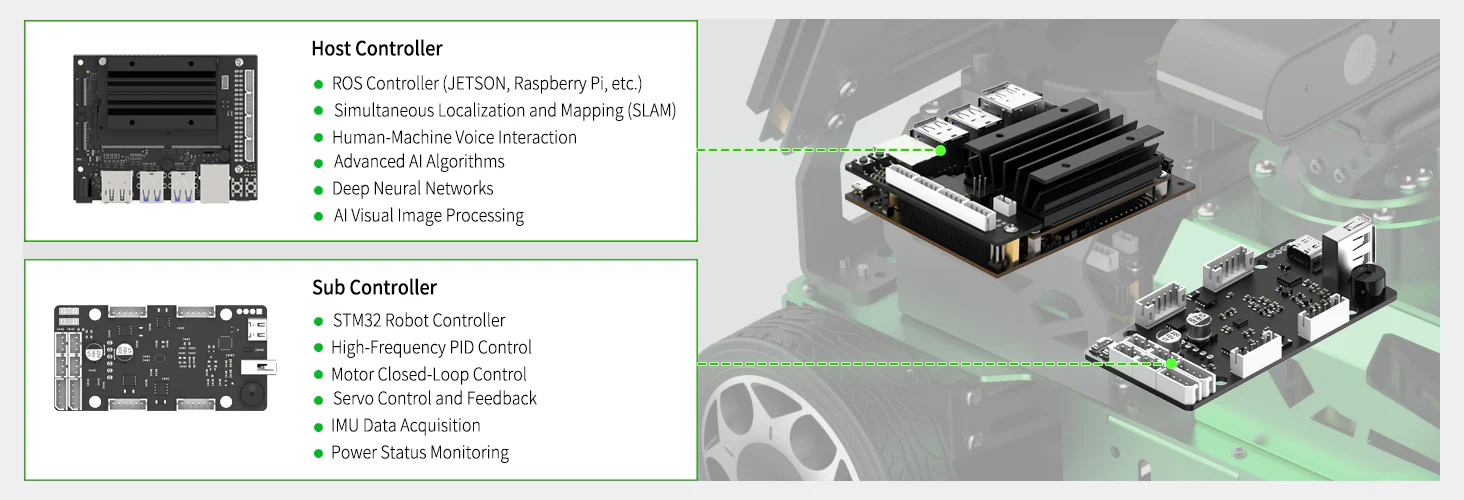
Host Controller
- ROS Denetleyici (JETSON )
- Eşzamanlı Konum Belirleme ve Haritalama (SLAM)
- İnsan-Makine Ses Etkileşimi
- Gelişmiş Al Algoritmaları
- Derin Sinir Ağları
- Yapay Zeka Görsel Görüntü İşleme
Alt Kontrolör (Sub Controller)
- STM32 Robot Kontrolörü
- Yüksek Frekanslı PID Kontrolü
- Motor Kapalı Döngü Kontrolü
- Senvo Kontrol ve Geri Bildirim
- IMU Veri Aktüelleme
- Güç Durumu İzleme
o ROS1 ve ROS2 Sistem Görüntüsü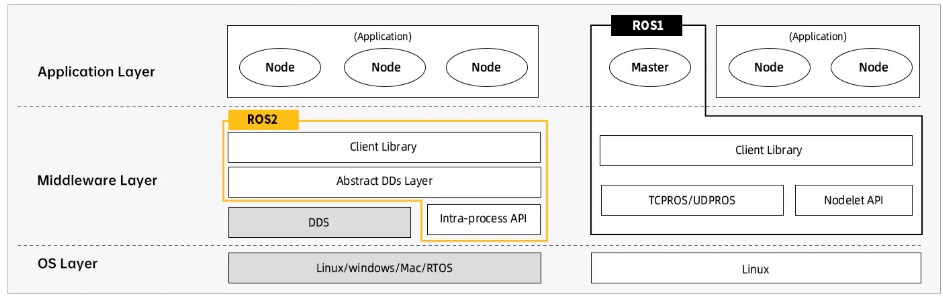
ROS1'in yükseltilmiş sürümü olan ROS2, daha fazla işletim sistemi ve derleme ortamını desteklerken tüm işlevlerini korur. Gerçek zamanlı kontrol, gelişmiş modüler geliştirme ve test imkanı sunarak ROS1'den daha güçlü özellikler ve daha geniş uygulamalar sağlar.o Lidar Haritalama Navigasyonu

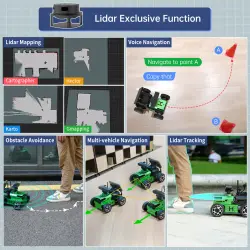
JetAcker, yol planlama, sabit nokta navigasyonu, navigasyon ve engellerden kaçınma, çoklu algoritma haritalamayı destekleyen ve radar koruma ve radar izleme işlevlerini gerçekleştiren lidar ile donatılmıştır.
- Lidar Konumlandırma
Lidar'ın kendi geliştirdiği yüksek hassasiyetli kodlayıcı ve IMU ivme ölçer sensör verilerini birleştiren JetAuto, doğru haritalama ve navigasyon elde edebilir.
- Çeşitli 2D Lidar Haritalama Yöntemleri
JetAcker, Gmapping, HectorKarto ve Cartographer gibi çeşitli haritalama algoritmalarını kullanır. Buna ek olarak, yol planlama, sabit nokta navigasyonu ve navigasyon sırasında engellerden kaçınmayı destekler.
- Çok Noktalı Navigasyon, TEB Yol Planlama
JetAcker, çevreyi tespit etmek için Lidar kullanır ve sabit nokta navigasyonunu, çok noktalı sürekli navigasyonu ve diğer robot uygulamalarını destekler.
- RRT Otonom Keşif Haritalama
RRT algoritmasını benimseyen JetAcker, keşif haritalamasını tamamlayabilir, haritayı kaydedebilir ve otonom olarak başlangıç noktasına geri dönebilir, böylece manuel kontrole gerek kalmaz.
- Dinamik Engellerden Kaçınma
JetAcker, navigasyon sırasında engelleri gerçek zamanlı olarak tespit edebilir ve engellerden kaçınmak için rotayı yeniden yerleştirebilir.
- Lidar Takibi
Lidar, öndeki hareketli nesneyi tarayarak robotun hedef takibi yapabilmesini sağlar.o 3D Görüntü Al Yükseltilmiş Etkileşim
JetAcker bir 3D derinlik kamerası ile donatılmıştır, 3D görüş haritalama ve navigasyonu destekler ve 3D nokta bulutu görüntüleri elde edebilir. Derin öğrenme sayesinde, daha fazla yapay zeka vizyonu etkileşimli oyun gerçekleştirebilir.
- 3D Derinlik Kamerası
Astra Pro Plus derinlik kamerası ile donatılmış olan JetAcker, çevresel değişiklikleri etkili bir şekilde algılayarak insanlarla akıllı Al etkileşimine olanak tanır.
- RTAB-VSLAM 3D Görüş Haritalama ve Navigasyon
RTAB SLAM algoritmasını kullanan JetAcker, 3D renkli bir harita oluşturarak 3D ortamda navigasyon ve engellerden kaçınmayı sağlar. Ayrıca, harita içinde küresel yerelleştirmeyi destekler.
- ORBSLAM2+ORBSLAM3
ORB-SLAM, kamera yörüngesini gerçek zamanlı olarak hesaplayabilen ve 3B çevreyi yeniden yapılandırabilen monoküler, binoküler ve RGB-D kameralar için açık kaynaklı bir SLAM çerçevesidir. Ve RGB-D modu altında nesnenin gerçek boyutu elde edilebilir.
- Derinlik Haritası Verileri, Nokta Bulutu
JetAcker, ilgili APl aracılığıyla kameranın derinlik haritasını, renkli görüntüsünü ve noktasını alabilir.o Derin Öğrenme, Otonom Sürüş
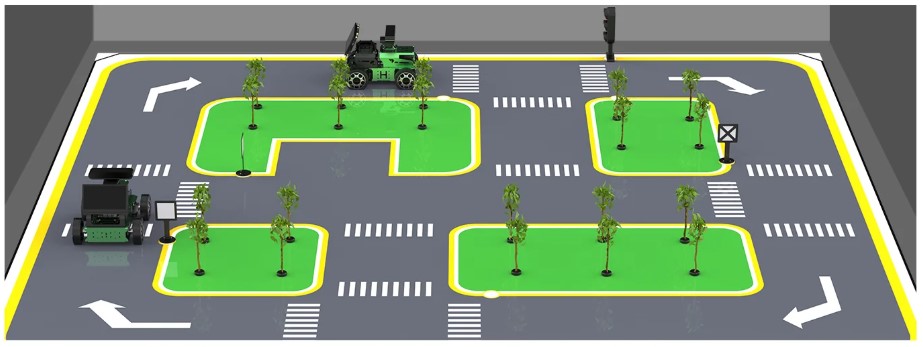
Derin öğrenme sayesinde JetAcker, otonom sürüşün temel özelliklerini öğrenmek için mükemmel bir platform olan otonom sürüş işlevlerini uygulayabilir.
1) Yol İşareti Algılama
JetAcker, derin öğrenme model kütüphanesini eğiterek Al vision ile otonom sürüşü gerçekleştirebilir.
2) Şerit Takip
JetAcker, şeritlerle arasındaki güvenli mesafeyi korumak için her iki taraftaki şeritleri tanıyabilir.
3) Otomatik Park Etme
Derin öğrenme algoritmasıyla birleştirilen JetAcker, park işaretini tanıyabilir ve ardından kendisini otomatik olarak yuvaya yönlendirir.
4) Dönüş Kararı Verme
Şeritlere, yol işaretlerine ve trafik ışıklarına göre JetAcker kullanacak ve trafik ışıklarına göre JetAuto trafiği tahmin edecek ve dönüp dönmeyeceğine karar verecektir.o MediaPipe Geliştirme, Yükseltilmiş Yapay Zeka Etkileşimi
JetAcker, insan vücudu tanıma, parmak ucu tanıma, yüz algılama ve 3D algılama gibi çeşitli işlevleri yerine getirmek için MediaPipe geliştirme çerçevesini kullanır.
1) Parmak Ucu Yörünge Tanıma
2) İnsan Vücudunu Tanıma
3) 3D Algılama
4) 3D Yüz Algılamao Yapay Zeka Görme Etkileşimi
JetAcker, yapay zekayı kullanarak KCF hedef takibi, çizgi takibi, renk/etiket tanıma ve takibi, YOLO nesne tanıma ve daha fazlasını gerçekleştirebilir.
1) KCF Hedef Takibi:
KCF filtreleme algoritmasına dayanarak, robot seçilen hedefi takip edebilir.
2) Görsel Çizgi Takibi:
JetAcker özel renk seçimini destekler ve robot renk çizgilerini tanımlayabilir ve bunları takip edebilir.
3) Renk / Etiket Tanıma ve İzleme
JetAcker, belirlenen rengi tanıyabilir ve takip edebilir ve aynı anda birden fazla Nisan Etiketini ve koordinatlarını tanıyabilir.
4) YOLO Nesne Tanıma
Nesneleri tanımak için YOLO ağ algoritmasını ve derin öğrenme model kütüphanesini kullanın.o 6 Kanal Uzak Alan Mikrofon Dizisi
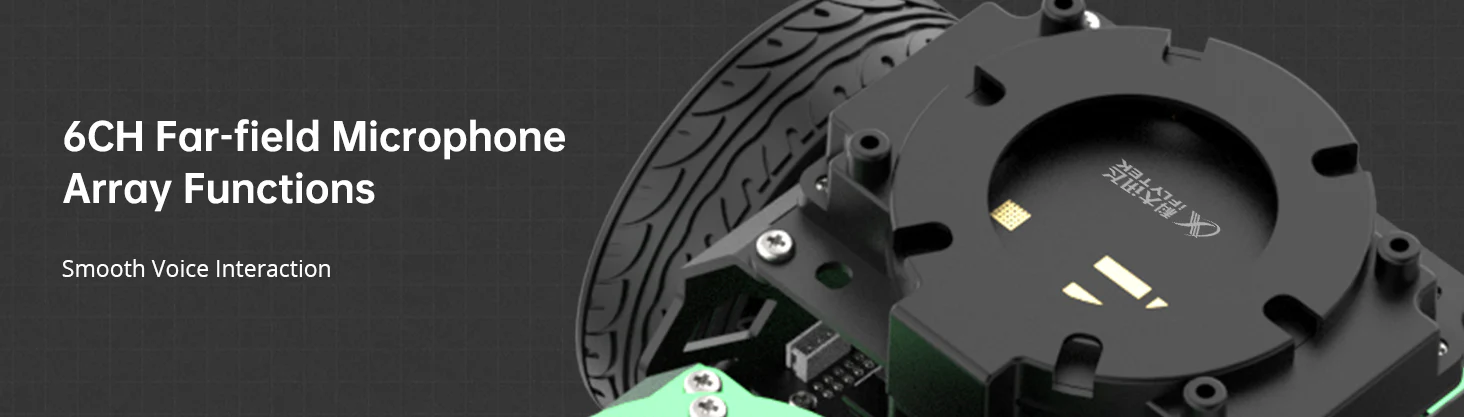
Bu 6CH uzak alan mikrofon dizisi, uzak alan ses kaynağı lokalizasyonu, ses tanıma ve ses etkileşiminde ustadır. Sıradan mikrofon modülüne kıyasla, daha gelişmiş işlevler uygulayabilir.
1) Ses Kaynağı Lokalizasyonu:
6 mikrofon dizisi sayesinde, gürültü azaltma kaynaklarının yüksek hassasiyetli konumlandırılması sağlanır. Radar mesafe tanıma ile Hiwonder herhangi bir yerde çağrılabilir.
2) TTS Ses Yayını
ROS tarafından yayınlanan metin içeriği, etkileşimli tasarımı kolaylaştırmak için doğrudan sesli yayına dönüştürülebilir.
3) Sesli Etkileşim
Konuşma tanıma ve TTS ses yayını, sesli etkileşimi gerçekleştirmek ve iFlytek'in çevrimiçi sesli konuşma işlevinin genişletilmesini desteklemek için birleştirilmiştir.
4) Sesli Navigasyon
Bir yemek dağıtım robotunun sesle kontrol senaryosuna benzer şekilde, Hiwonder'ı harita üzerinde belirlenen herhangi bir konuma ulaşmak üzere kontrol etmek için sesli komutları kullanın.
o Çoklu, Akıllı Grup Formasyonu
JetAcker, çoklu uçak iletişimi ve navigasyon teknolojisi sayesinde çoklu uçak oluşum performanslarını ve yapay zeka oyunlarını gerçekleştirebilir.
1) Çoklu Araç Navigasyonu
Çoklu makine iletişimine bağlı olarak, JetAcker çoklu araç navigasyonu, yol planlaması ve akıllı engellerden kaçınma sağlayabilir.
2) Akıllı Formasyon
Bir JetAcker grubu, hareket sırasında yatay çizgi, dikey çizgi ve üçgen dahil olmak üzere oluşumu koruyabilir.
3) Grup Kontrolü
Bir grup JetAcker, tek bir kablosuz kol tarafından kontrol edilerek eylemleri tek tip ve eşzamanlı olarak gerçekleştirebiliro ROS Robot İşletim Sistemi

ROS, robotlar için açık kaynaklı bir meta işletim sistemidir. Donanım soyutlama, düşük seviyeli cihaz kontrolü, yaygın olarak kullanılan işlevlerin uygulanması, işlemler arasında mesaj geçişi ve paket yönetimi gibi bazı temel hizmetler sağlar. Ayrıca bilgisayarlar arasında kod elde etmek, derlemek, yazmak ve çalıştırmak için gereken araçları ve kütüphane işlevlerini de sunar. Robotik araştırma ve geliştirme için kod yeniden kullanım desteği sağlamayı amaçlamaktadır.
o Gazebo Simülasyonu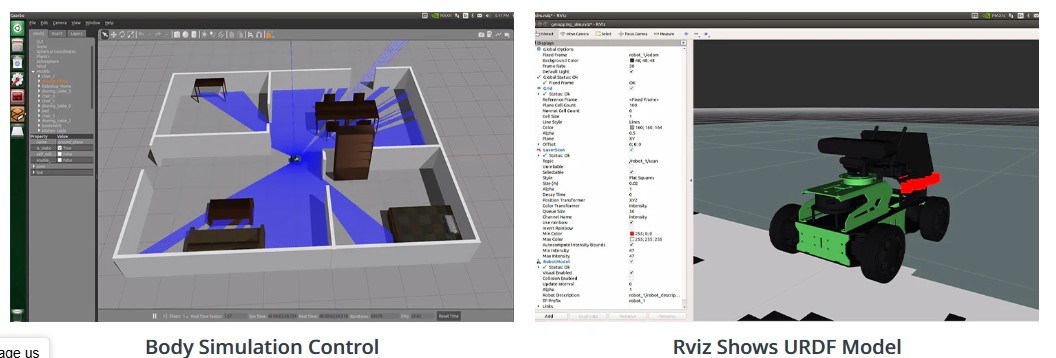
JetAcker, Robot İşletim Sistemi (ROS) üzerine inşa edilmiştir ve Gazebo simülasyonu ile entegre edilmiştir. Bu, robotun simüle edilmiş bir ortamda zahmetsizce kontrol edilmesini sağlar ve olası hataları önlemek için algoritma ön doğrulamasını kolaylaştırır. Gazebo, her bir uç nokta ve merkezin hareket yörüngelerini gözlemlemenize olanak tanıyan görsel veriler sağlar. Bu görsel geri bildirim algoritma geliştirmeyi kolaylaştırır.
1) Simülasyon Kontrolü
Robot simülasyon kontrolü aracılığıyla, algoritmanın yineleme hızını artırmak ve deneme yanılma maliyetini azaltmak için haritalama navigasyonunun algoritma doğrulaması gerçekleştirilebilir.
2) URDF Modeli
Doğru bir URDF modeli sağlayın ve hata ayıklamayı ve algoritmaları iyileştirmeyi kolaylaştırmak için Rviz görselleştirme aracı aracılığıyla eşleme navigasyon etkisini gözlemleyin.o Çeşitli Kontrol/Kumanda Yöntemleri

1) Python Programlama
2) WonderAi Uygulaması
3) Harita Navigasyon Uygulaması (Sadece Android)
4) Kablosuz TutamakÖZET
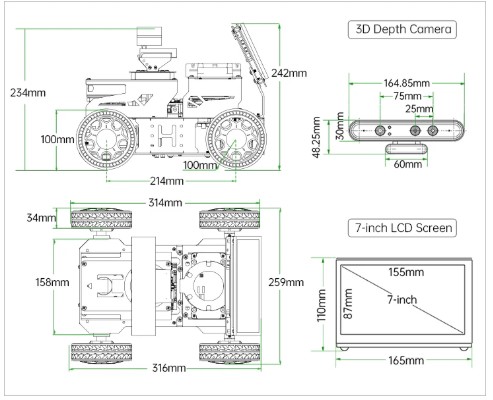
- Boyut: 316*259*242mm
- Ürün ağırlığı: 4,8 kg
- Malzeme: Tam metal sert alüminyum alaşımlı braket (anodize)
- Pil: 11.1V 6000mAh lityum pil
- Sürekli çalışma ömrü: 90 dakika
- Donanım: ROS denetleyicisi ve ROS genişletme kartı
- İşletim sistemi: Ubuntu 18.04 LTS + ROS Melodic
- Yazılım: iOS / Android uygulaması
- İletişim: USB/ WiFi/ Ethernet
- Programlama dili: Python/ C/ C++/ JavaScript
- Depolama: 32GB TF kart
- Servo: HTS-20H seri bus servo
- Kontrol yöntemi: Telefon/Kulp kontrolü
- Paket boyutu (gelişmiş kit): 38*31*23cm
- Paket ağırlığı (gelişmiş kit): Yaklaşık 5 kg
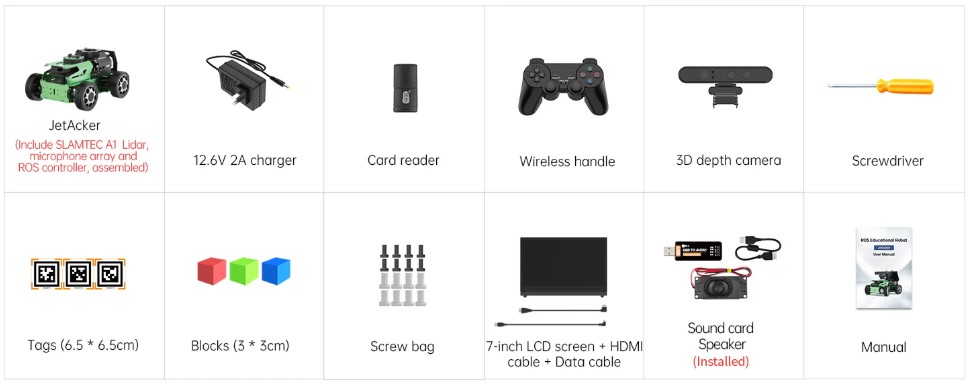
Paket İçeriği ve Boyutlar
paket İçeriği
boyutlar













-
") 43.903,60 TL + KDV
43.903,60 TL + KDV -
60.968,09 TL + KDV



")
")
 - Sol + Sağ")
- Sol + Sağ")
 - Sağ")
, 0.5kg Payload, Sol + Sağ")
, 0.5kg Payload, Sağ")
")
