
 Tüm Kategoriler
Tüm Kategoriler 






- Ürün Özellikleri
- Ödeme Seçenekleri
- Yorumlar (0)
-
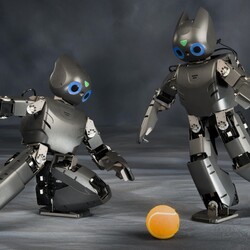
Açık Platform İnsansı Robot (Humanoid) Projesi
- DARwIn-OP (Dinamik İnsan Şeklinde Zeki Açık Platform Robot) düşük maliyetli, minyatür insansı robot platformudur.
- Bir platform olarak DARwIn-OP oldukça gelişmiş bilgisayar gücüne, sofistike sensörlere, yüksek taşıma kapasitesine ve dinamik hareket kabiliyetlerine sahiptir.
- Tüm bu özellikleri sayesinde birçok ilginç araştırma ve eğitimsel aktiviteye olanak sağlar.
Ürün İçeriği
1) Tam Toplanılmış DARwIn-OP robotu
2) 3 batarya paket
3) 1 battarya şarj edici
4) 1 Batar şarj edici güç adaptörü
5) 1 Güç kablosu
6) 1 ethernet kablosu
7) 2 Sıkma Anahtarı, 2 tornavida
8) 1 yedek kablo seti
9) 1 yedek vida ve somun seti
10) 1 kırmızı top
11) 1 set renk yaması (7 farklı)
12) 1 USB flaş sürücü (yüklü kurtarma yazılımı ile)
13) 1 hızlı başlangıç klasörü
14) 1 CD Roboplus yazılımı
15) 2 yedek sigortaYüksek Perforamans ve Gelişmiş Özellikler
- Varsayılan yürüme hızı: 24.0 cm/san (9.44 in/san) 0.25 san/adım – kullanıcı tarafından ayarlanabilir koşma tarzı
- Varsayılan ayağa kalkma süresi: 2.8 san (yüz üstü) ve 3.9 san (sırtüstü) – kullanıcı tarafından ayarlanabilir hız
- Dahili PC: 1.6 GHz Intel Atom Z530 on-board 4GB flash SSD
- Ana Kontrol Denetleyici (CM-730): ARM CortexM3 STM32F103RE 72MHz
- 20 motor modülü (6 serbestlik dereceli ayak x2+ 3 serbestlik dereceli kol x2 + 2 serbestlik dereceli boyun)
- Dayanıklı Metal dişlili motorlar (DYNAMIXEL MX-28)
- Self-Bakım Kiti (Kolay adım adım talimatlarla)
- Düşük güç harcamaya yönelik bekleme modu- Bağlantılı kontrol için 3Mbps yüksek hızlı Dynamixel bağlantı
- Batarya (30 dakika operasyon süresi), şarj, ve harici güç adaptörü
(Batarya robotu kapatmadan harici güç adaptörüne bağlanmasından sonra sökülebilir.)
- Esnek fonsiyonlar (kalıtsal, gerçek zamanlı ve gelecek zamanlı sınırlandırma yapılabilir)
- 3-eksen gyro, 3-eksen ivme sensörü, buton x3, tespit mikrofonu x2
DARwIn-Op için Açık Kaynaklar (Open Sources)
- Mekanik Bilgi
(Boyutlar, Kinematik, Dinamik, CAD verisi)
- Elektronik Bilgi
Denetleyiciler, Alt B/Ds, Şemalar, Parça Bilgisi)
- Yazılımsal Bilgi
(Geliştirme Ortamı, Framework, Kaynak Kodu)
- Yönetimsel Bilgi
(Detaylı Montaj Planları, Kullanıcı Bakım Kılavuzu)
- Sosyal Kaynaklar
(Kullanıcılar Tarafından Geliştirilmiş Kodlar, Farklı Uygulama Örnekleri)


-
") 133.518,30 TL + KDV
133.518,30 TL + KDV -
2.669.273,75 TL + KDV
-
2.143.212,50 TL + KDV
-
1.700.931,38 TL + KDV
-
1.077.841,05 TL + KDV
-
60.083,24 TL + KDV
-
98.803,54 TL + KDV
-
3.312.237,50 TL + KDV
-
18.073,52 TL + KDV
-
30.546,62 TL + KDV
-
43.755,83 TL + KDV
-
60.762,88 TL + KDV
")
")
")
")


")


")
")
