
 Tüm Kategoriler
Tüm Kategoriler 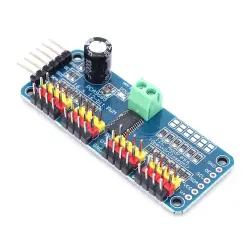

")
")
")
")
- Ürün Özellikleri
- Ödeme Seçenekleri
- Yorumlar (0)
-
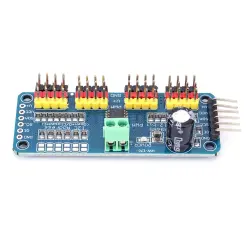
PCA9685 16 Kanal 12 Bit PWM Servo Motor Sürücü Kartı - I2C (Klon)
PCA9685 16 Kanal 12 Bit PWM Servo Motor Driver, bir I2C Arayüzü aracılığıyla 16 x Servo Motoru / LED'i kontrol etmenizi sağlar. Mikrodenetleyicinizin sadece 2 IO hattını kullanarak robotik projeler (robot kolları, hexapodlar, dronlar, led durum göstergeleri, led süslemeler vb.) oluşturmak için harika bir çözümdür. PCA9685 16 Kanal 12 Bit PWM Servo Motor Sürücü kartının temel özellikleri:
1. 16 Kanal: PCA9685, her biri 12 bit çözünürlüğe sahip 16 adet tamamen programlanabilir PWM çıkışı sağlar. Bu, her kanalın görev çevrimini (duty cycle) ayarlamak için toplam 4096 programlanabilir adım elde edeceğiniz anlamına gelir.
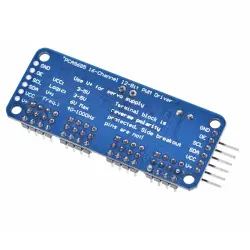
2. I2C Arayüzü: Modül, I2C veri yolu üzerinden iletişim kurarak Arduino veya Raspberry Pi gibi mikro denetleyicilere bağlanmayı kolaylaştırır.
3. Frekans ve Görev Döngüsü Kontrolü: 24Hz ila 1526Hz arasında programlanabilen 16 kanalın tümünün frekansını ayarlayabilirsiniz. Ek olarak, görev döngüsü (darbe genişliği) %0 ila %100 arasında ayarlanabilir.
4. Geniş çalışma voltajı aralığı: Geniş 2,3V ila 5,5V çalışma aralığı, modülün çeşitli güç kaynaklarından beslenmesini sağlar. 3,3V ile beslendiğinde Raspberry Pi veya 3,3V veya 5V toleranslı olmayan diğer mikrodenetleyicilere güvenli bir şekilde bağlanabilir. Bu modül üzerindeki PWM çıkış pinleri maksimum 25mA sink edebilirken veya maksimum 10mA source edebilir. Motorlar, ampuller vb. gibi yüksek akımlı cihazları doğrudan bu pinlerden sürmeye çalışmayın.
5. Zincirlenebilir: Birden fazla PCA9685 modülünü papatya zinciri şeklinde birbirine bağlayabilirsiniz. Aslında, 62 adede kadar bağlayabilir, 992 adede kadar servoyu kontrol edebilirsiniz - hepsi aynı 2 pini kullanarak!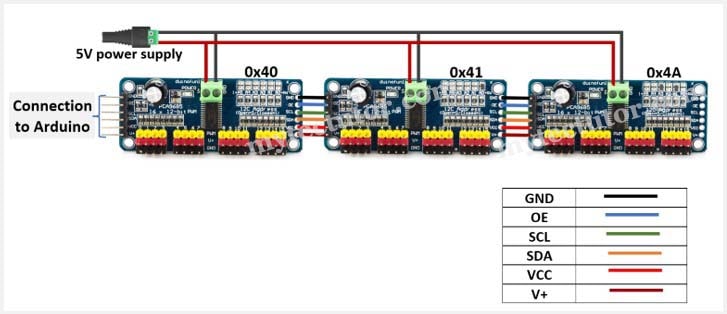

-
 146,13 TL + KDV
146,13 TL + KDV -
194,84 TL + KDV
-
89,63 TL + KDV

 - 5-15V, 500mA")
")

")
")





