
 Tüm Kategoriler
Tüm Kategoriler 





Dynamixel-X XC330-M288-T Commercial Sınıf Servo Motor | 0.215Nm, 81rpm, TTL
- Ürün Özellikleri
- Ödeme Seçenekleri
- Yorumlar (0)
-
Dynamixel-X XC330-M288-T Commercial (Ticari Kullanım için) Servo Motor | 0.215Nm, 81rpm, 5V, TTL, RC protokol desteği
Dynamixel-X grubunda yer alan servo motorlar; çok eklemli robotlar yapmak için kullanılan, yüksek performanslı ve ağ kontrollü yeni Robotis servo motor serisidir.
Beklentileriniz XL serisine göre biraz daha yüksekse bu serinin bir benzeri olan Robotis Dynamixel XC robot servoları düşünebilirsiniz! XC, XL serisinin doğrudan bir iyileştirmesidir. Dynamixel XC servolar XL serisine göre biraz daha yüksek tork sunabilmekle birlikte temel fark, kullanılan çekirdeksiz motor ve bunun sağladığı daha sessiz çalışmadır! Ayrıca XC servolar tümüyle metal dişli barıdırdığından XL serisine göre toplamda biraz daha ağır ancak daha dayanıklıdır. XC330 ürünler XL330 aktüatörler ile boyut uyumludur ve birbirinin yerini alabilir!
XL veya XC serisi servolardan birini seçin ve robotsepeti.com desteğiyle alışverişinizi hemen gerçekleştirin!
Bu ürün XC330-M288-T:
XC330-M288-T XC X= Yeni Dynamixel-X servo motor grubu C= Commercial (ticari kullanımlı robotik yapılar için) ürün serisi 330 330= 34mm yüksekliğe sahip servoları içine alan boyut sınıfı M288 M= 3.7V minimum besleme voltajı (5V önerilen) 288= 288:1 redüksiyon oranı T T= TTL haberleşme arayüzü - Nominal çalışma gerilimi:5.0V, stall tork: 0.215[N.m] (@ 5.0 [V]) ve yüksüz hız: 81[dev/d] (@ 5.0 [V])
- XC330 servo aktüatörler diğer serilerin birçoğundan farklı olarak 3.7V-6V arası gerilimde çalışır ve TTL 3.3 Lojik seviyelerini destekler.
- RC Protokol desteği: XC330 servo motorların ön plana çıkan özelliklerinden biri RC hobi servo motorlar gibi kontrole ve RC alıcılar ile doğrudan kontrole imkan sağlayan protokolleri desteklemesidir, bunlar:
o Experimental S.BUS= S.BUS destekleyen RC receiver ile uyumlu çalışmayı sağlar,
o Experimental iBUS= iBUS desteği sunan RC receiver ile uyumlu çalışmayı sağlar,
o RC-PWM= RC hobi servo motor kontrolü sağlayan PWM sinyalini destekleyen protokoldür.
RC Protokollerden bir seçildiği halde başlangıç(boot) esnasında algılanamazsa Dynamixel XL330 Protocol 2.0'a otomatik geçer. Diğer durumda RC modda başlar ve "torque on" durumuna geçer!!!
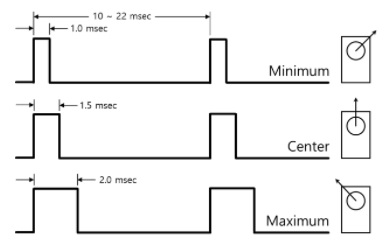 (Üstte:RC-PWM modundan sinyaller)
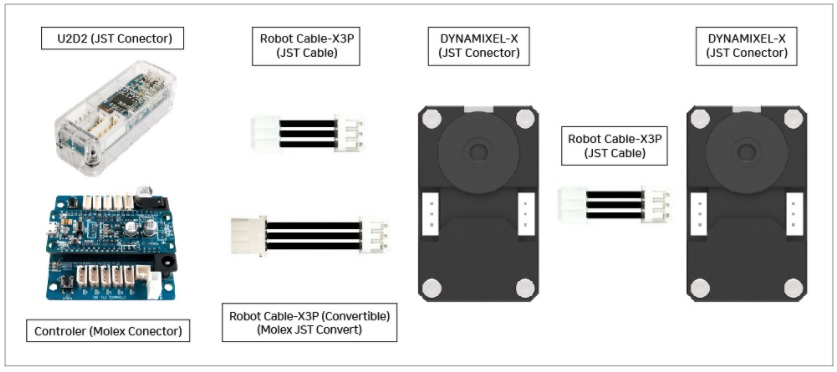
(Üstte:RC-PWM modundan sinyaller)- U2D2 ile PC üzerinden veya bir OpenCM denetleyici ile servo motor kontrolü sağlanmak istenirse bağlantı:
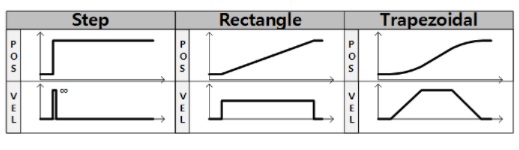
- Diğer Dynamixel ler gibi sarsıntısız hareket geçişleri sağlamak için Profil kontrolü özelliği mevcuttur.
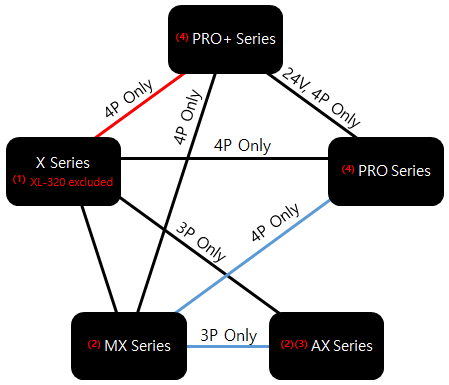
- Dynamixel XC430 için diğer Dynamixel ler ile olan konektör/kablo uyumluluğunu aşağıdan kontrol ediniz!
Dynamixel-X Servo Aktüatör Genel Özellikleri:
o Tüm Dynamixel-X servo aktüatörler, DC Motor + Mikrodenetleyici + Sürücü + Sensör + Redüktör + Ağ Bağlantı Elemanları bileşenleri barındıran hepsi bir arada (all-in-one) aygıtlardır; enerji ve haberleşme bağlantılarını sağladıktan sonra robot kontrolü ne başlayabilirsiniz. Ücretsiz kaynak kodlar hızlı başlangıç sağlar!

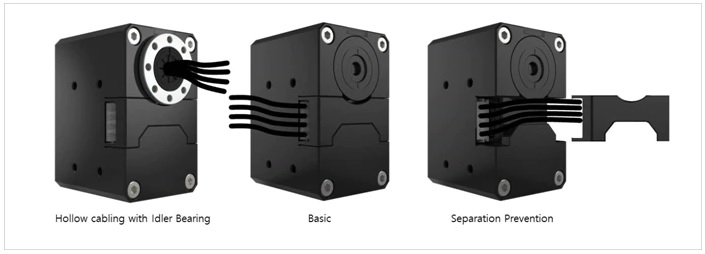
o Dynamixel-X servolar hareket esnasında kablo hasarını önlemek için hareket kısıtlamalarını önleyecek oluklu arka kasa ve 3 farklı kablo yönlendirme (3-way-routing) seçeneğine sahiptir [Avara yatak içinden geçen kablaj(üstten), temel bağlantı(sağ) ve kabarma/ayrılma önleme ile kros kablaj (sol)]
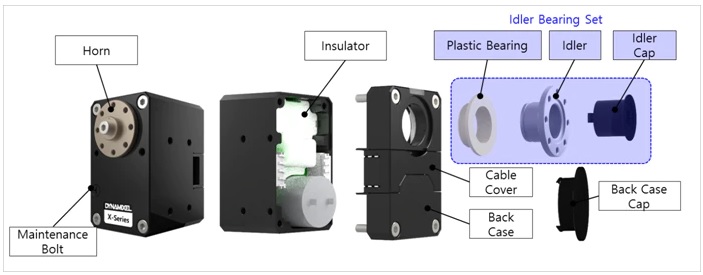
o Dynamixel-X servo motor temel parçalarını tanıyın!
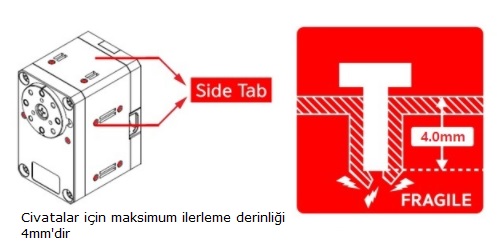
o Dynamixel-X Akıllı Servo Aktüatörlerde Mekanik Özellikler:
- Vidalama yuvaları maksimum 4mm derinliğe kadar güvenlidir, daha fazla ilerleme gövdeye zarar verecektir
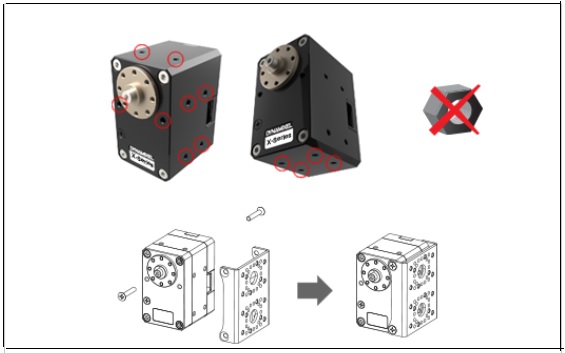
- Gövde üzerine somunsuz vidalama sağlanabilir.
o Dynamixel-X aktüatörler farklı geliştirme ortamlarınca desteklenirler (Bknz, aşağıdaki görsel). Robotis'in sunduğu RoboPlus (R+) GUI tabanlı arayüz programları sayesinde simulatif programlama veya ters kinematik uygulamaları yapabilirsiniz. Dynamixel robot servo kontrol kodlarını C, C++, Matlab, C#, Python, ROS, Visual Studio, Visual Basic, LabVIEW, Eclipse, Java ve daha bir çoklarıyla yazabilirsiniz. Tüm bunlar için bir PC ve U2D2 çevirici gerekmektedir!
Ayrıca Dynamixel-X zincir bağlantı (daisy-chain) şeklini destekler ve 253 e kadar servo birbirine bağlanabilir.

o Gelişmiş veri geribesleme ve kontrol modları:
- Konum Kontrolü, Hız Kontrolü, Akım (Tork) Kontrolü, PWM Kontrolü için farklı modlar
- Kullanıcıların hassas hareketler oluşturabilmeleri için konum ve hız kontrolü sağlayan PID kontrol (Dynamixel MX, Dynamixel X ve PRO serileri).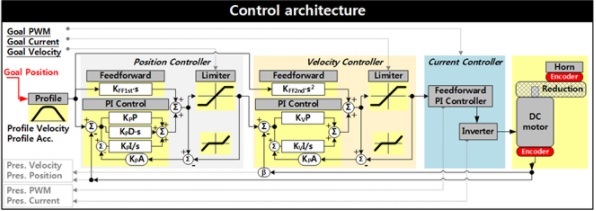
o Dynamixel servo motor çeşitleri
- Başlangıç seviyesinden yüksek performans ürünlere farklı seriler
- Spur dişli gibi alt uçtaki ürünlerden (Dynamixel serisi) sikloid dişli gibi üst uçtaki ( Dynamixel Pro ) ürünlere...
- Dynamixel'in konumlanmasına göre nüvesiz ucuz motorlardan BLDC motorlara doğru faklı parça tercihi
o Humanoid robotlar, endüstriyel robot kol, eğitim robotları gibi yapılarda kullanılabilen Dynamixel-X motorlar sıradışı yapısal özellikler gösteren serilere sahiptir:
- XW serisi IP68 koruma sınıfında ve su geçirmez yapıdadır (1m, 24h)
- Tek modül üzerinde 2 DoF çıkış veren 2XL ve 2XC serisi... Robotların boyun, omuz, bel bölgesinde kullanılan bu servo grubu, 2 farklı servo kullanmaya göre daha az ağırdır ve daha az hacim kaplar!
o Dynamixel-X servo aktüatörlerde isimlendirme: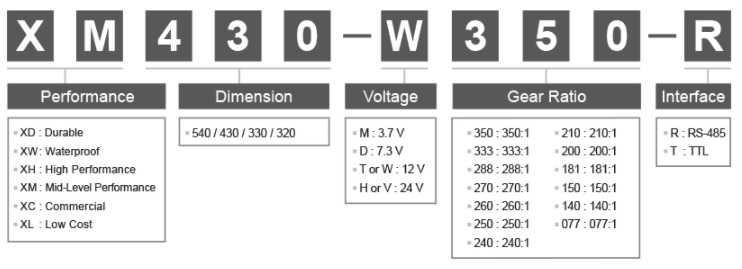
Ürün Özeti ve Paket İçeriği
Ürün Teknik Özellikleri:
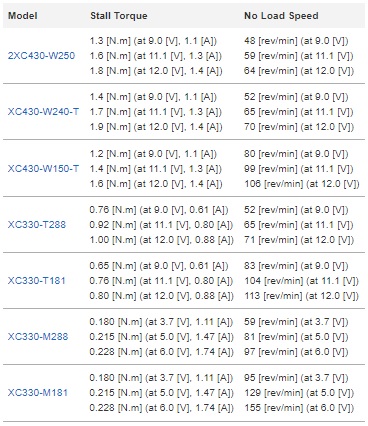
MCU :ARM CORTEX-M0+ (64 [MHz], 32Bit) Pozisyon Sensörü :Temazsız Mutlak Enkoder (12Bit, 360 [°]) Motor :Çekirdeksiz DC Motor Baud Rate :9600 [bps] ~ 4 [Mbps] Kontrol Yöntemi :PID Backlash :X Ağırlık :23g Boyut (WxHxD) :20.0 x 34.0 x 26.0 [mm] Çözünürlük Açı / Adım / Açı :0.088° / 4096 / 360° Redüksiyon Oranı 288.35:1 Giriş Gerilimi :3.7 ~ 6.0 [V] (Önerilen : 5.0 [V]) Stall Tork -0.69 [N.m] (@3.7 [V], 1.34[A]stall akımı)-0.93 [N.m] (@5 [V], 1.80[A]stall akımı)-1.10 [N.m] (@6 [V], 2.15[A]stall akımı)Yüksüz Hız -59 [devir/d] (@ 3.7 [V])
-81 [devir/d] (@ 5.0 [V])
-97 [devir/d] (@ 6.0 [V])Radyal Yük :X Eksenel Yük :X Çalışma Modu(Protokol 2.0)1) Velocity Control2) Position Control (0 ~ 360 [°])3) Extended Position Control (Multi-turn)4) PWM (Voltage) Control5) Current Control6) Current Based Position ControlÇalışma Sıcaklığı :-5℃ ~ +60℃ Fiziksel Bağlantı- TTL Half Duplex Asenkron Seri Haberleşme(8bit, 1stop, No Parity - 5V Lojik)- Protokol 2.0Link :TTL Level Multi Drop Bus (3.3V Lojik ve 5V ile de uyumlu) ID :253 ID (0 ~ 252) Protokol-Dynamixel Protocol 2.0-Experimental S.BUS-Experimental iBUS-RC-PWMGeri Besleme :Pozisyon, Hız, Akım, Sıcaklık, Yük, Giriş Voltajı, Yörünge, Gerçek-zamanlı Tick
Dişli Malzemesi :Full Metal Kasa Malzemesi :Mühendislik Plastiği (Arka, Ön ve Orta) Standby akımı:17mA
XC330-M288-T İle Kullanılabilen Robotis Ürünleri:-- Denetleyici:
TTL Dynamixel için = CM-550, (OpenCM9.04 + OpenCM 485 EXP), OpenCR, Shield = Arduino MKR Shield kartı -- AraYüz Kartı: USB2Dynamixel, U2D2
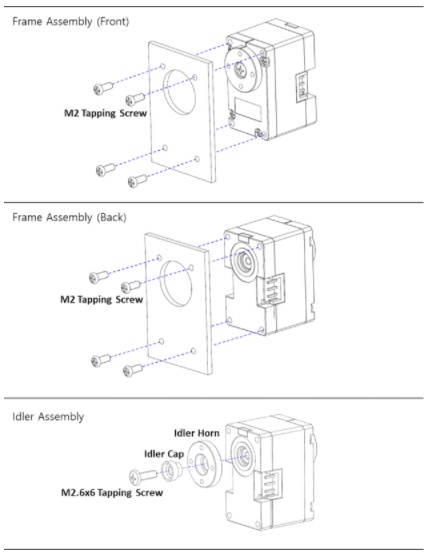
-- Frame (Şase) ve Horn (Flanş) Setler:
Uyumlu Frame/Horn Set = FPX330-H101 4 parça set, FPX330-S101 4 Parça Set, FPX330-S102 2 Parça Set
-- Gear Set: -XC330-M288-T Kutu İçeriği:
- XC330-M288-T
- Robot Kablo-X3P 180mm (JST - JST)
- 6 x PHS M2x6 kılavuz civata (flanş için)
- 10 x PHS M2x8 kılavuz civata (şase için)
Uyarı: Avara kasnak ve kapağı FPX330-H101 Şase set içindedir ve bu set ayrı olarak temin edilmelidir.
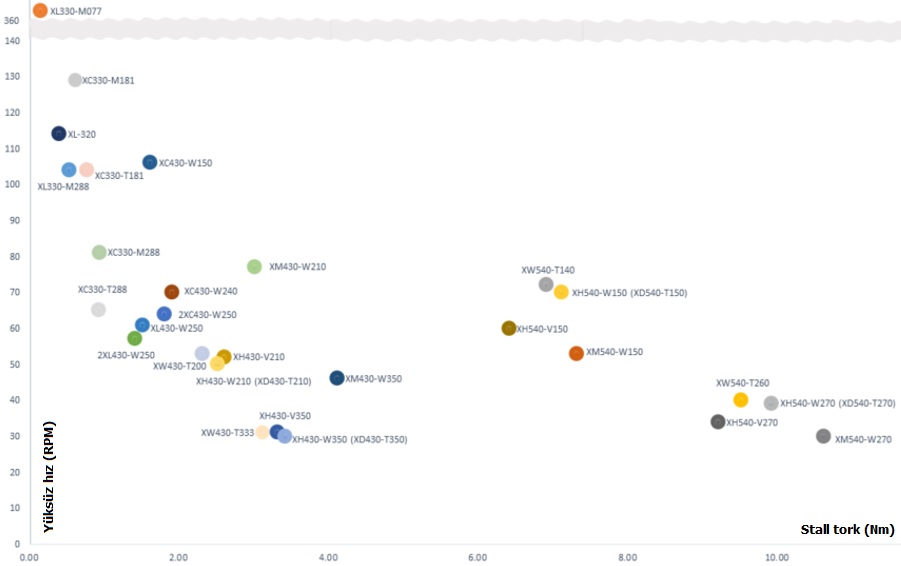
XC Serisi Karşılaştırma
Dynamixel-X XC Serisi Servolar ve Diğerleri için tork-hız grafiği
Dynamixel-X XC serisi içinde performans parametreleri:
XC330-M288-T ve Farklı Şaseler (Frame Set) ile Çok Yönlü Bağlantı Şekilleri
Montaj Kombinasyonları:
Bağlantılar




















 Servo Motor | 9.5Nm, IP68")






